Для чего нужна калибровка квадрокоптера

Дрон в полёте может клониться в стороны и крутиться по кругу. Неправильная настройка квадракоптера может привести к несчастному случаю, Вы можете нанести телесные травмы себе и окружающим или испортить чьё нибудь имущество и вся ответственность ляжет на оператора который управлял данным аппаратом. Так что с помощью триммирование квадрокоптера Вы сможете его настроить и избежать непредвиденных ситуаций.
Следует ли калибровать квадрокоптер?
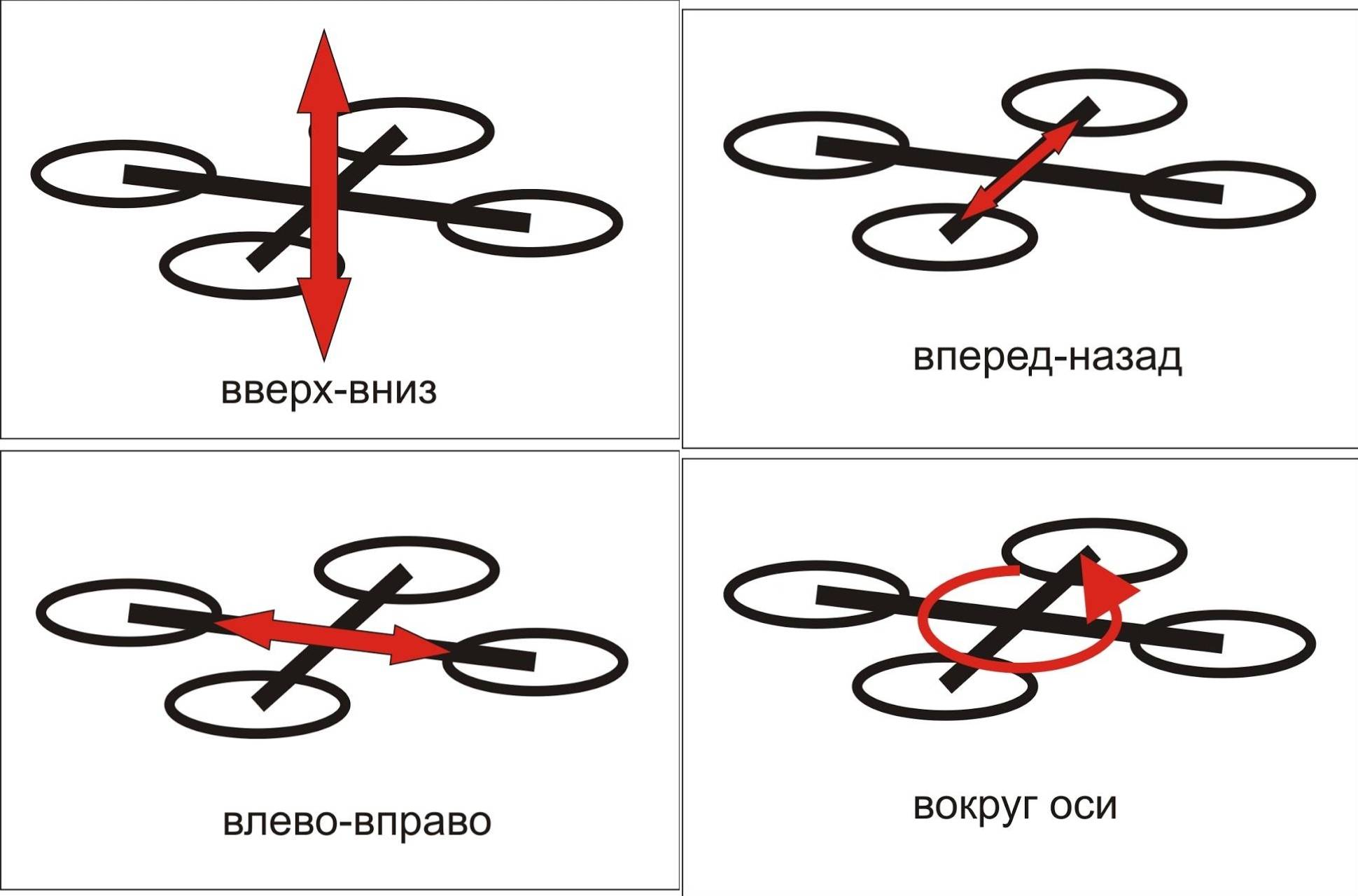
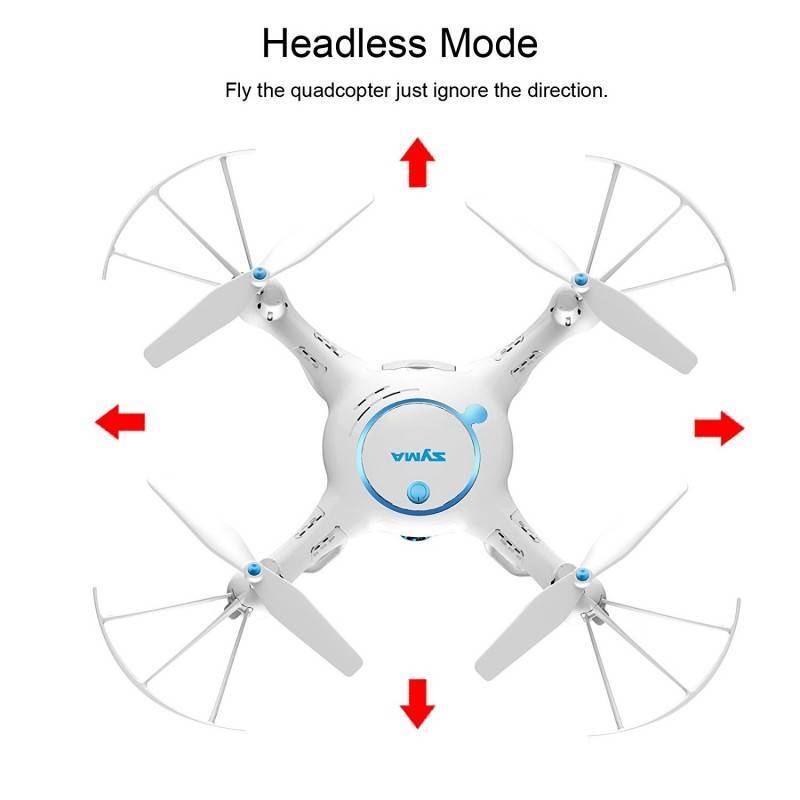
Чтобы это понять, поднимите его на высоту и попробуйте полетать. Команда «вперёд» даёт на дрон сигнал лететь строго вперёд, без наклонов в какие-либо стороны. Точно так же проверить и другие направления. Если нарушения при полёте были выявлены – не стоит откладывать дело в долгий ящик, надо действовать.
Где должна происходить калибровка?
Калибровка квадрокоптера осуществляется на высоте более полуметра. Так и безопаснее, и ничего не мешает. Калибровать удобней всего при безветрии.
Типы калибровки
Существует 3 типа калибровки:
- Механическая – её используют в случае, если отклонение от необходимой оси не слишком большое. Осуществляется путём подкручивания регулятора тяги коптера.
- Автоматическая – осуществляется настройкой аппарата с пульта управления. Нужна, если требуется сместить триммер на 5 позиций или больше. Калибровка зависит от пульта и контроллера, так что без мануала тут не обойтись.
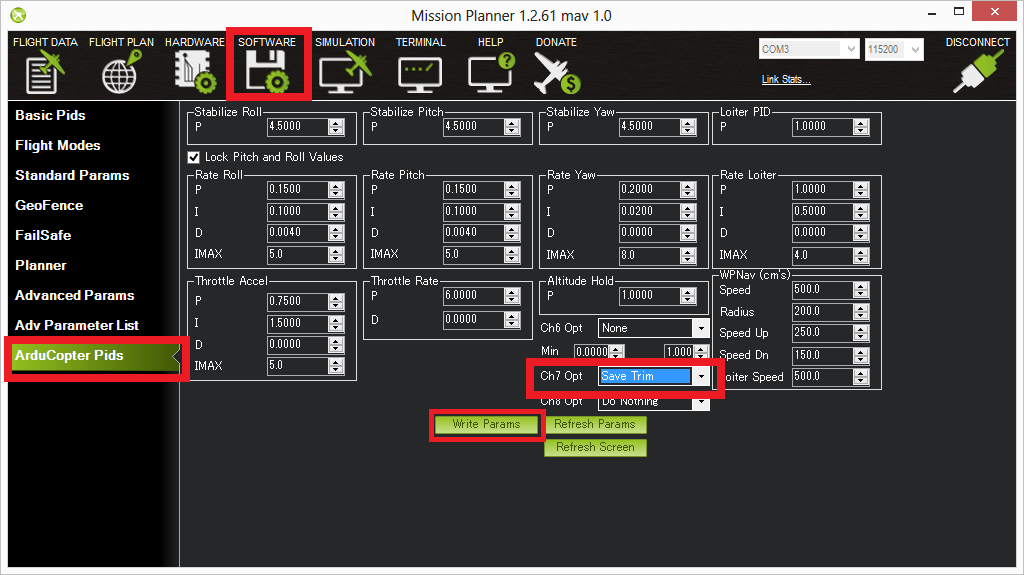
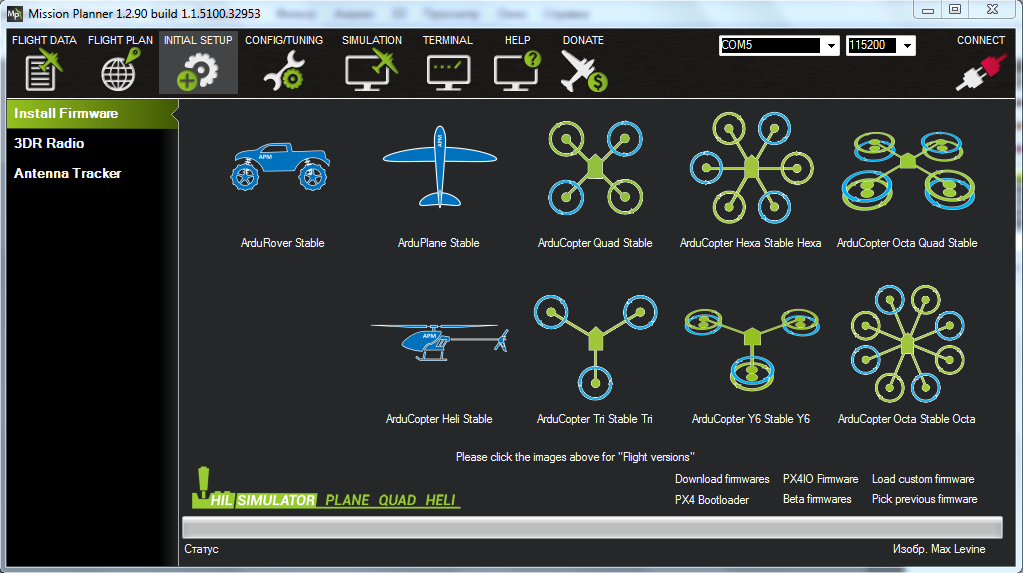
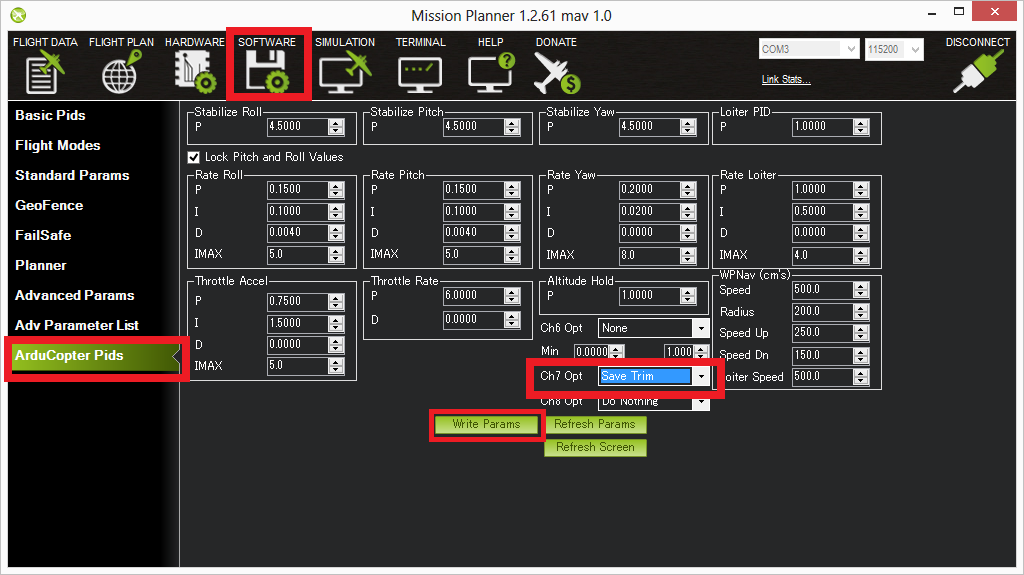
- При помощи программного обеспечения mission planer. Программа заточена для работы с платами Ardupilot. Все необходимые настройки задаются программно. Обычно производится перед первым полётом собранного дрона.
Для калибровки выполните следующие действия

- Включите передатчик радиоуправления (само радиоуправление должно быть отлажено). Выставьте ручку газа на всю.
- Возьмите Li-Po аккумулятор и подключите к разъёму Power-модуля, чтобы включить автопилот.
- Далее APM начнёт моргать красными и синими светодиодами. Это значит, что он готов для калибровки после следующего включения. Отключите аккумулятор от APM.
- Опять включите питание. Регуляторы издадут стандартный сигнал (число сигналов равно числу банок в батарее), а после издадут двойной короткий сигнал, подтверждающий калибровку по максимальной скорости.
- Опустите ручку газа до минимального положения. Один длинный сигнал – откалибровано по минимальной скорости.
- Теперь регуляторы для APM8 успешно откалиброваны. Можете проверить работу моторов.
- Уберите газ на минимальное состояние и выключите питание Ardupilot.
Betaflight настройки для Tiny Whoops в режиме Angle Mode
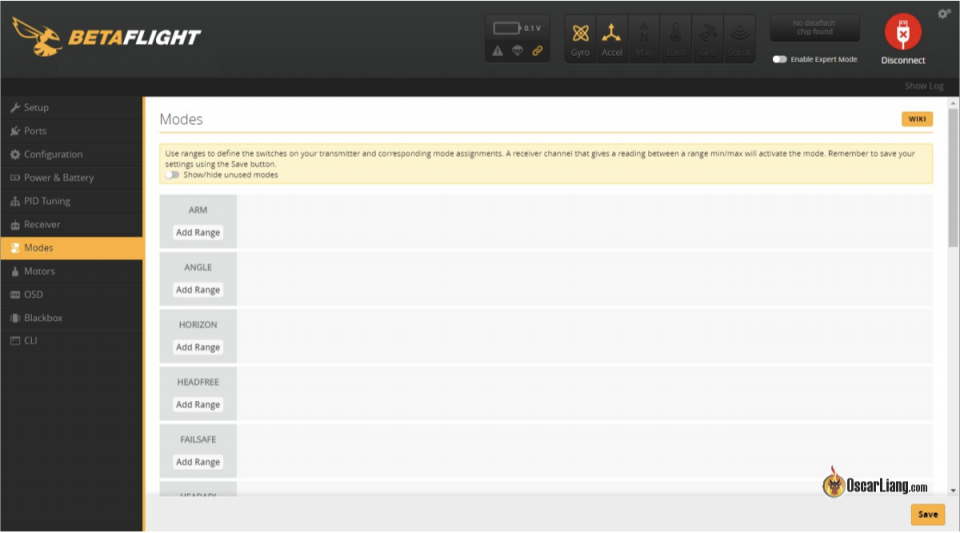
Включите Accelerometer, чтобы можно было активировать Angle Mode.
Вы можете добавить режим Angle mode в разделе Modes и назначить режим Angle на нужный Вам канал.
Установите Angle Strength до 70
По умолчанию значение – 50. Angle Strength как-будто невидимая резинка, тянущая квад, чем выше число, тем жестче резинка.
Также есть Horizon Strength, это то же самое, что Angle Strength, но для режима Horizon. Horizon Transition – это степень от горизонта, до которой квад будет совершать переворот.
Установите Angle Limit до 55
Это максимальный угол, на который Вам разрешено наклонять дрон по роллу и питчу. Это влияет на то, насколько быстро вы сможете летать на дроне, поскольку скорость напрямую зависит от угла наклона вперед.
Включить компенсацию VBAT
Он увеличивает Ваши значения PID при снижении напряжения батареи, поэтому управление Вашим крошечным квадрокоптером останется относительно одинаковым от начала до конца полета.
Установите Camera Angle в разделе Configuration (опционально)
Лично я предпочитаю обычно устанавливать половину от моего реального угла камеры, например для угла камеры 20 градусов я бы установил его на 10.
Так как вы летаете в наклоне, отклонения стика яв не даст вам ровный разворот в плоскости, либо же ось вашего ролла также будет смещена относительно угла камеры. Эта настройка компенсирует наклон вупа при движении вперед по углу камеры для того чтобы движение по другим осям было ровным относительно угла камеры.
Некоторые предпочитают отключать это для режима Acro, вы можете сделать это, включив FPV Angle Fix в разделе Modes, назначив тот же переключатель, который вы используете для режима Angle.
Как откалибровать акселерометр?
Это очень важно, откалибровать правильно акселерометр (ACC) чтобы дрон оставался на месте, когда Вы его не контролируете. Наша цель, чтобы дрон как можно меньше дрейфовал в режиме Angle
Во первых, наблюдайте визуально за дроном в режиме Angle, чтобы увидеть дрейфует ли он в каком-либо из направлений. Если это происходит, Вы можете немного убавить акселератор, чтобы уменьшить дрейф.
Посадите дрон, задизармите его и выполните калибровку акселерометра стиками (газ вверх, яв влево, питч вниз).
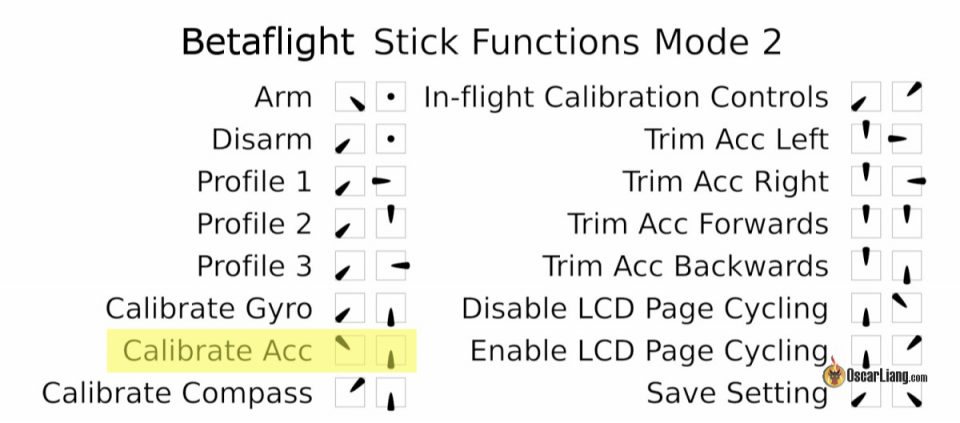
Затем уменьшите ACC, в соответствии с командами на изображении выше.
Например если вуп взлетая тянет влево, в дизарме поднимите газ вверх, а правым стиком наклоните вправо на 1 секунду, чтобы задать трим в 1 единицу. Не забывайте сохранить настройки соответствующей комбинацией стиков.
Как настроить и откалибровать квадрокоптер
Настройку управления квадрокоптера осуществляют при проведении первого полета устройства. Первым делом необходимо установить в соответствующее гнездо аккумулятор, разместить дрон на ровной поверхности и включить аппарат. Около десяти секунд займет автоматическая настройка гироскопов, после чего можно будет переходить к подсоединению пульта управления. Алгоритм выглядит так:
- для трехосевых моделей — пульт включают и ждут семь секунд, когда повторяющиеся короткие сигналы сменятся финальным длинным, сообщающим об успешной синхронизации;
- для шестиосевых моделей — пульт включают и до упора поднимают вверх ручку газа, а потом опускают максимально вниз и дожидаются звукового сигнала.
Дальше необходимо перейти к практическому испытанию и триммировать квадрокоптер на открытой местности в безветренную погоду. Устройство поднимают в воздух и передвигают его в разных направлениях, наблюдая за креном:
- если дрон отклоняется вперед или назад, настройки требует левый рычаг;
- если влево или вправо, нужно триммировать правый стик;
- если коптер одновременно кренится вбок и вверх или вниз, следует настроить оба рычага.
 Триммеры могут быть выполнены в форме колесиков или нажимных кнопок
Триммеры могут быть выполнены в форме колесиков или нажимных кнопок
Для калибровки пульта квадрокоптера необходимо воспользоваться триммерами тангажа, расположенными рядом с обоими джойстиками. Их аккуратно подкручивают в нужную сторону, пока полет дрона не станет ровным и послушным. Обычно один из джойстиков требует более тщательной калибровки, чем другой.
Важно! Автоматическую настройку проводят обычно первой. Уже после нее при необходимости выполняют механическую калибровку квадрокоптера для ликвидации незначительных отклонений
Как настроить карманный квадрокоптер
Бюджетные маленькие устройства обычно не предполагают долгой и тщательной калибровки регуляторов квадрокоптера. Для большинства моделей настройка проводится в автономном режиме перед первым запуском. Дрон ставят на ровный стол и включают пульт управления, после чего переводят оба стика до упора вниз, а потом максимально влево.
В течение нескольких секунд светодиоды на коптере будут мелко моргать. Затем раздастся длинный звуковой сигнал, он будет означать, что устройство прошло калибровку и готово к запуску.
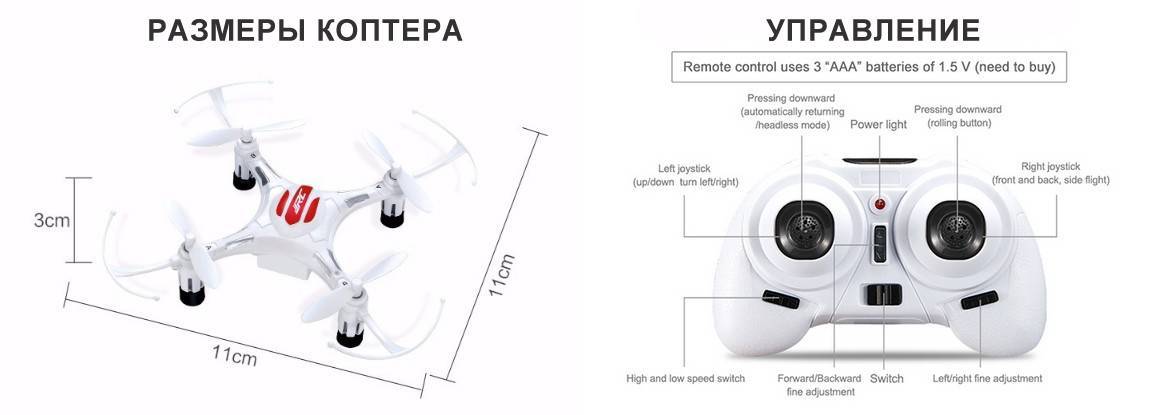
Квадрокоптер Syma X5C: как откалибровать
Перед непосредственной калибровкой квадрокоптера Syma X5C, изучаем все функции и кнопки пульта ДУ. Включаем квадрокоптер Syma X5C с помощью задвижки на корпусе дрона в положение «On», также переводим в рабочий режим пульт ДУ и зажимаем левый стик вниз до предела.
Набираем высоту и смотрим, как ведет себя дрон, есть ли отклонения. Если отклонения очень заметны, то нужно произвести сброс настроек. Это делается следующим образом: дрон ставится на ровную поверхность, включаем его и регулируем сначала гироскоп, а затем акселерометр. Чтобы настроить гироскоп, зажимаем стики на джойстике вниз и налево. Для акселерометра тоже самое, только направо. На этом калибровка квадрокоптера Syma X5C завершена.
Запускаем квадрокоптер и смотрим, если полет нормальный, значит все хорошо. Если нет, то смотрим ниже как делается триммирование. Эту процедуру необходимо сделать, чтобы изменить обороты моторов и устранить отклонения.
Калибровка квадрокоптера на основных режимах полёта
Для того чтобы правильно произвести настройку квадрокоптера, надо знать основные режимы полёта:
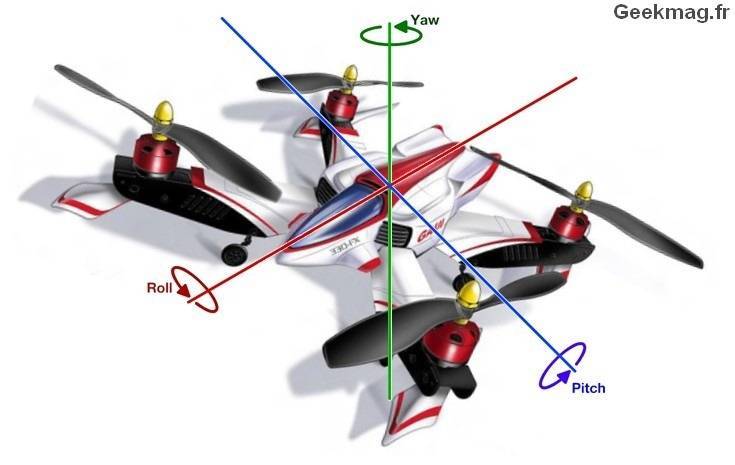
- Stabilize. В этом режиме автопилот, без применения стиков сам убирает крен и тангаж и приводит квадрокоптер к горизонту.
- AltHold. Режим выдерживания высоты. Считывая показания барометра, дрон выдерживает заданную высоту, стиком газа её корректируют с начальными показателями.
- Acro. Если не трогать стики, тангаж и крен остаются неизменными, чтобы их выровнять нужно перемещать стики в противоположную сторону.
- Auto. По данным GPS перемещение по путевым точкам.
- Loiter. Режим зависания. Аппарат выдерживает заданные координаты и высоту.
- Position. Режим зависания с помощью газа.
- Guided. Перелёт в заданный waypoint и нахождение в этой точке.
- Circle. Сохраняя радиус, перемещение вокруг заданной точки.
- RTL. Режим возврата на точку старта с посадкой или зависанием на двухметровой высоте над этой точкой.
- OF Loiter. Используя OpticalFlowSensor, выполняется режим зависания с ещё большей точностью.
- Drift. Самолётный режим с выдерживанием заданного курса.
- Sport. При выполнении съёмки, высота выдерживается автоматически вместе с углом крена.
- Land. Выполнение посадки.
Теперь зная основные режимы полёта, вполне понятно для чего необходима тщательная калибровка квадрокоптера.
Калибровка квадрокоптера на основных режимах полёта
Для того чтобы правильно произвести настройку квадрокоптера, надо знать основные режимы полёта:
- Stabilize. В этом режиме автопилот, без применения стиков сам убирает крен и тангаж и приводит квадрокоптер к горизонту.
- AltHold. Режим выдерживания высоты. Считывая показания барометра, дрон выдерживает заданную высоту, стиком газа её корректируют с начальными показателями.
- Acro. Если не трогать стики, тангаж и крен остаются неизменными, чтобы их выровнять нужно перемещать стики в противоположную сторону.
- Auto. По данным GPS перемещение по путевым точкам.
- Loiter. Режим зависания. Аппарат выдерживает заданные координаты и высоту.
- Position. Режим зависания с помощью газа.
- Guided. Перелёт в заданный waypoint и нахождение в этой точке.
- Circle. Сохраняя радиус, перемещение вокруг заданной точки.
- RTL. Режим возврата на точку старта с посадкой или зависанием на двухметровой высоте над этой точкой.
- OF Loiter. Используя OpticalFlowSensor, выполняется режим зависания с ещё большей точностью.
- Drift. Самолётный режим с выдерживанием заданного курса.
- Sport. При выполнении съёмки, высота выдерживается автоматически вместе с углом крена.
- Land. Выполнение посадки.
Выбор настроек регуляторов
- Brake: OFF. Торможение мотора после установки газа в «ноль». Может иметь значения включен/выключен
- Battery Type: Ni-xx(NiMH or NiCd). Не выбираем типа батарей Li-Po, т.к. регулятор остановит моторы, когда напряжение аккумулятора просядет, а так хоть есть шанс попытаться посадить коптер.
- CutOff Mode: Soft-Cut. При плавном выключении мотора контроллер сбрасывает обороты постепенно.
- CutOff Threshold: Low. Мотор будет выключен только при достижении минимального напряжения на аккумуляторе.
- Start Mode: Normal. Выбираем среднее значение из доступных (золотая середина). Мягкий и жесткий старт не рекомендуется.
- Timing: MEDIUM. Параметр, от которого зависит мощность и КПД двигателя. Может находится в пределах от 0° до 30°. Физически это электрический угол опережения коммутации обмоток.
На данный момент процедуру калибровки регуляторов считаем выполненной. Пробовать запускать моторы пока не будем, т.к. еще не произведена процедура первоначальной настройки контроллера.






Если вы нашли ошибку на странице, то нажмите Shift + Enter или , чтобы уведомить нас.
Рекомендации и частые ошибки
Чтобы грамотно и успешно управлять коптером, не надо совершать ошибок. Нельзя запускать дрон среди деревьев. Если его отправить в полет с не полностью заряженным аккумулятором, то он продлится недолго, но в худшем случае аппарат разрядится непосредственно в небе.
Не разрешается запускать беспилотник там, где находятся люди, если он случайно упадет, может их травмировать. Новичкам рекомендуется проводить учебные полеты над не асфальтированным мягким грунтом. Тогда при непредвиденном падении техника не получит существенных повреждений. Направлять устройство в сторону озера, пруда или реки нельзя, если он туда свалится, вытащить вряд ли получится.
При первых полетах специалисты советуют использовать режимы со включенной системой стабилизации, а потом переходить к ручному управлению. Не стоит запускать в ветреную и пасмурную погоду. В процессе обучения желательно создавать квадрокоптеру незначительные препятствия, например, коробки разные по высоте и длине, и преодолевать их.
При наличии в беспилотном летательном аппарате камеры надо освоить навыки воздушной съемки, отработать переключение режимов фото и видео, выучить настройки. И конечно понять, как включить камеру на квадрокоптере.
Некоторые квадрокоптеры управляются браслетом
Дорогостоящие модели квадрокоптеров запускаются с помощью специального браслета, благодаря которому можно управлять жестами. Беспилотник летит в любую из сторон, подчиняясь движениям руки. Минус данной системы управления – невысокая точность. Дрон может распознать не все жесты и запускается лишь при хорошем дневном освещении.
Включить и управлять квадрокоптером не сложно, но новичкам необходимо быть внимательными и осторожными, следует до автоматизма отработать простые пути. Только после этого можно запускать летальный аппарат в городской черте.
Топ-10 квадрокоптеров с простым управлением
Детали
Для начала вам потребуется 4 мотора плюс 1 запасной. Пропеллеры тоже стоит взять с запасом, должно быть минимум 2 стандартных и 2 – обратного вращения. 4 регулятора скорости, плюс несколько запасных. В качестве источника питания не стоит брать один суперёмкий аккумулятор, так как он будет только придавать лишний вес устройству. Правильнее всего предпочесть несколько мелких, чтобы менять их по очереди. Рама должна быть максимально прочной и легкой. Вариант, описанный выше, можно назвать вполне подходящим. В качестве мозгов и датчиков устройства можно использовать программируемый микроконтроллер, плата – AllInOne, акселерометр, гироскоп, управляющая арматура, аккумуляторы, зарядное устройство, а также многое другое. Под последним следует понимать необходимое количество болтиков, винтиков, проводочков, стяжек. Вам потребуются также инструменты для работы, такие как паяльник и принадлежности для работы с ним, дрель, а также умелые руки.
Советы по настройке и калибровке квадрокоптера
Вообще, информация о триммировании должна содержаться в инструкции производителя. Также в ней всегда указывают, нужно ли вообще производить калибровку после покупки коптера, то есть, во время его первого полета. Но если вы купили китайский дрон за 50$, то нормальной инструкции может в принципе не быть. А если она и будет, то важная информация имеет право отсутствовать – все-таки сколько заплатили, то и получили.
Если вы раньше никогда не работали с коптерами, то далеко не факт, что сможете с первого раза его откалибровать. Новички, как правило, даже при правильных настройках не могут сразу же научиться держать коптер в зависшем состоянии. А если настройки сбиты, поддерживать такое состояние машины очень сложно – ее постоянно кидает в стороны, из-за чего реагировать нужно моментально. Поэтому если есть опытный человек, которого можно попросить помочь, лучше так и поступить. Иначе в процессе калибровки вы рискуете ударить об что-нибудь машину и поцарапать корпус (если не нанести ему еще более пугающие повреждения).
Для калибровки не нужно выпускать коптер в воздух в замкнутом помещении, или в той местности, где куча препятствий. Как минимум за пятьдесят метров лучше пусть ничего рядом не будет. Хотя опытные управляющие способны работать с коптером даже в маленькой комнате, но ведь не все из вас опытные, не правда ли?
Не спешите с калибровкой. Для начала разберитесь в функциях своего пульта. В большинство случаев стик слева необходим для перемещения дрона в вертикальной оси (бывают исключения в зависимости от модели). Правый стик – это крены вбок, также он отвечает за наклон вперед. Настраивать калибровку на земле не рекомендуется, поскольку с такой схемой точности не добиться. Машину придется поднять в воздух.
Механическое триммирование.
Сделав пробный взлет, мы обнаружили, что вертолет сильно тянет в одну из сторон, несколько перемещений индикатора триммера не исправило ситуацию, тогда вернем триммер в нулевое положение и приступим к механическому триммированию модели.
Изменим длину тяги от сервопривода до тарелки автомата перекоса, подкрутив соответствующий регулятор совсем немного. Помните, что регулировать необходимо по-немногу, каждый раз проверяя результат. Основные действия должны заключаться в следующем:
- Если вертолет уходит вперед – снимите правую тягу, вращая наконечник тяги против часовой стрелки удлините ее немного и поставьте обратно.
- Если вертолет уходит назад – снимите правую тягу, вращая наконечник тяги по часовой стрелке укоротите ее немного и поставьте обратно.
- Если вертолет уходит влево – снимите левую тягу, вращая наконечник тяги против часовой стрелки удлините её немного и поставьте обратно.
- Если вертолет тянет вправо – снимите левую тягу, вращая наконечник тяги по часовой стрелке укоротите ее и поставьте обратно.
Удлинение и укорачивание тяг производите плавно и проверяйте результат, порой достаточно повернуть наконечник на несколько градусов, чтобы добиться нужного результата.После каждого действия с регулировкой, запускайте модель и проверяйте ее поведение в воздухе. Повторите указанные выше пункты несколько раз, чтобы добиться необходимого эффекта и стабильного полета.
Как подготовить квадрокоптер к полету?
- Вставьте аккумулятор в квадрокоптер, но пока не включайте его (если у вашего дрона встроенная батарея, то пропустите этот пункт).
- Поставьте коптер на ровную поверхность. Если будут уклоны, то калибровка собьется. Поэтому ищите ровную площадку, чтобы не пришлось десятки раз перенастраивать дрон.
- Теперь нужно активировать сам аппарат. Но при включении пусть он будет у вас в руках. Как только активировали, сразу же ставьте на ровную площадку. Как правило, синхронизация гироскопов происходит за пару секунд (на стареньких моделях процесс длиться немного дольше). Коптер беспокоить секунд 10-20 не стоит. Пусть гироскопы начнут работать и произойдет калибровка.
Пробное включение
На квадрокоптере нужно подключить батарею, оставив APM подключённым через USB к компьютеру. Теперь можно активировать плату (Arm), нажав левый стик на аппе в правое нижнее положение (независимо от того, mode 1 или mode 2). Mission Planner покажет, что аппарат в режиме “Armed”:

Если этого не происходит, то можно попробовать Arm / Disarm с помощью одноименной кнопки в закладке Actions (Действия). Если и она не помогает, то в настройке Arming Check (меню Config/Tuning -> Standard Params) нужно на время тестирования выставить значение Skip GPS или Disabled. Этот параметр включает запрет на активацию коптера при любых проблемах: нет сигнала с передатчика, низкое напряжение, отсутствие сигнала от барометра, акселерометра или GPS. Последний случай как раз наш, если мы сидим дома.
После активации нужно увеличить газ и посмотреть, в какую сторону вращаются моторы. Направления вращения должны соответствовать схеме:
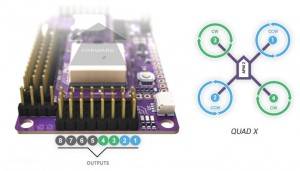
Для изменения направления вращения нужно поменять местами два любых провода между соответствующим мотором и его регулятором. Также по этой схеме нужно будет закреплять пропеллеры на моторах. На тех, которые вращаются по часовой стрелке, должны быть левостронние (LH или pusher) пропеллеры, а на остальных, соответственно – правосторонние (RH или normal).
Триммирование квадрокоптера Syma X5C
Используйте эти простые правила при триммировании. Наблюдается крен коптера в левую сторону, производим триммирование вправо. Аналогично и в другую сторону. Если наблюдается тангаж, это когда коптер кивает либо вперед, либо назад. Если вперед кивает, то триммирование производится назад. И наоборот.
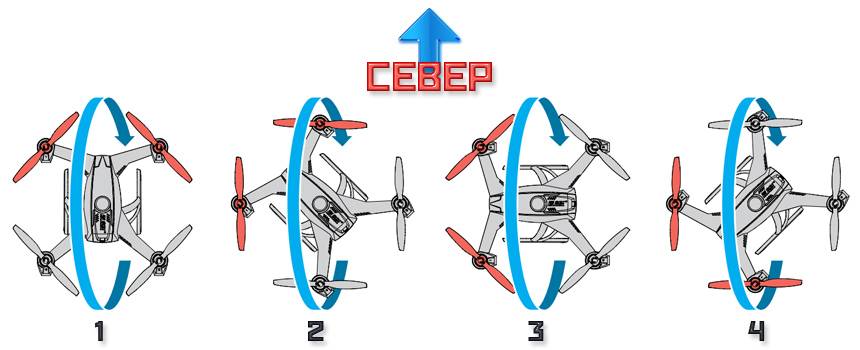
После проделанной процедуры триммирования, нужно сделать 360-градусный «флип», т.е. разворот квадрокоптера на 360 градусов по одному из четырёх направлений. Делается это с помощью одновременного нажатия кнопки вверху джойстика и правого стика в ту сторону, куда хотите сделать «флип».
Производители квадрокоптеров Syma сделали моторы с высокими и низкими оборотами, это говорит о двух режимах потребления энергии. Попробуйте проверить качество этих режимов перед тем, как использовать квадрокоптер уже в «боевых» условиях.
Из-за специфической конструкции Syma X5C, в процессе калибровки может возникнуть проблема, когда моторы работают, а пропеллер не вращается. В этом случае стоит проверить правильность сборки коптера, по схеме идущая в комплекте к квадрокоптеру.
Телеметрия [править]
Можно установить блок телеметрии Walkera WK-CTL01-D, в комплекте есть 2 провода для измерения напряжения и 4 датчика температуры.
Отдельно можно приобрести датчики
- RPM (WK-MP-RPM)
- GPS (WK-GPS) – для фиксирования координат, высоты, скорости, даты, времени.
Разъемы шлейфов Molex PicoBlade 1.25mm (они также используются в микро батареях 1S LiPo).
miminOSD бывают разные, в основном 2 типа
- обычная minimOSD, она все данные берёт из контроллера devo;
- minmOSD KV team mod, к которой можно подключать внешние датчики тока, напряжения и RSSI, и не надо ничего паять на DEVO для RSSI. Но данные можно также брать и с контроллера DEVO.
16 комментарий(ев) “ Квадрокоптер h36 — У Вас еще не было коптера? ”
Очень интересная штука! Вот только время полёта конечно маловато! Может при думают какой нибудь генератор, что бы произвольно батарейки в режиме полёта заряжались.
Михаил, не знаю помнишь ли ты, раньше в СССР в детском мире продавали радио управляемую машину скорой помощи. Но она была без пульта, а управлялась при помощи хлопков в ладоши. Для меня это было самым дорогим подарком…Жаль что он не сохранился.
Жаль, но у меня такой увы не было, только камазы железные с ключиком, заводные петушки)
Кто то на такие квадрокоптерэ камеры навешивает, хотя вес камеры должен быть небольшим, что бы дрон поднялся в воздух. Интересно же, летаешь и самого себя снимаешь, прикольно.
Да, так же коптер можно купить уже с камерой, самые дешевые модели на 1-2 тыще дороже, правда камера там не «але», ради интереса только.
Первое всегда запоминается, у тебя дрон первый, у меня скорая помощь. Вот до сих пор помню, потому что это первая машина была у меня.
а клавиша «1», «8» за что отвечает?
как я понимаю это клавиши переключения режимов. Быстрыймедленный и другая клавиша хз.







Чем дальше, тем больше начинаю любить коптеры и дроны. В одном из своих видео на ютубе я рассказывал, про очередной квадракоптер, зритель мне рассказал о том, что он летает уже 2ой год на jjrc h 31. И рекомендует его для теста.
Сказано сделано, спустя 2 месяца после этой переписки я делаю на него полноценный обзор.
И так, чтобы съэкономить вам время, обзор будет состоять из:
- Что в коробке?
- Тех характеристики.
- Что нужно знать перед запуском?
- Как запустить, или же инструкция jjrc h 36
- Впечатления от полета.
- Видео обзор, собственного приготовления (а не как другие сайты тырят чужие ролики, у меня все свое).
- Общее впечатления, итог.
- Сколько стоит и где купить, чтобы сэкономить.

Модификации коптера:
На коробке написаны 3 варианта:
- JJRC H31
- JJRC H31C
- JJRC H31W
Что они обозначают и в чем разница, производитель умалчивает. Каждый их них, делится еще на 4 вида по наличию камеры: без камеры.
- 30W (камера 0,3 пикселя)
- 200W (камера 2 пикселя)
- 500W (камера 5 пикселей)
Я выбрал себе модель без камеры.
Советы и типичные ошибки
На первых этапах никогда не запускайте аппарат слишком высоко, особенно в тех ситуациях, когда недалеко от вас находится огромное количество людей. При совершении малейших ошибок техника может не только упасть и сломаться, но также травмировать окружающих людей. Вращающиеся лопасти могут нанести серьезные увечья.
Если вы новичок, никогда не направляйте аппарат сторону рек. Затем, уже после освоения базовых навыков, вы сумеете полноценно пользоваться квадрокоптером над реками, на территории парков и мест, где сосредоточено большое количество людей.
Неопытным пользователям не нужно приобретать дорогостоящие модели. Вне зависимости от аккуратности обучения управлению или места для тренировочных полетов, всё-таки нередко приходится сталкиваться с ситуацией, когда коптеры падают. С другой стороны, техника предлагает широкие возможности для новичков, упрощающих маневрирование в сложных местах – четвертые Фантомы даже анализируют обстановку с помощью бортовых датчиков, предотвращая столкновения.
Беспилотник — это устройство с простой схемой управления. Набравшись немного практики, вы сами убедитесь в этом.
Источник
Основные правила полёта
Здесь мы поговори о том, каких правил стоит придерживаться перед и вовремя первого полёта. Безопасность превыше всего!
- Выберите для полётов хороший безветренный день.
- Место для полёта должно быть в виде большой открытой площадки без зданий или линий электропередач.
- Убедитесь, что бы в месте запуска и полёта отсутствовали люди, животные, имущество.
- Перед запуском проведите осмотр дрона на наличие неисправностей/повреждений, неправильно/ненадёжно установленных пропеллеров, защиты пропеллеров, камеры и т.д.
- Постарайтесь свести к минимуму любые факторы, которые могут отвлечь вас на момент полёта, например, стоит перевести свой мобильный телефон в бесшумный режим и т.д.
Первый вылет
После обеспечения безопасности можно переходить к практическим тренировочным полётам. Начинать надо с простого, и первым делом проработайте следующее:
- Отработайте взлёт и зависание в воздухе на высоте до двух метров с последующей посадкой.
- Совершите короткие полёты из точки «А» в точку «Б» с последующей посадкой.
- Добейтесь уверенного стабильного пилотирования при выполнении первых двух пунктов.

Последние этапы сборки
Установите в переднюю часть палубы держатель курсовой камеры.
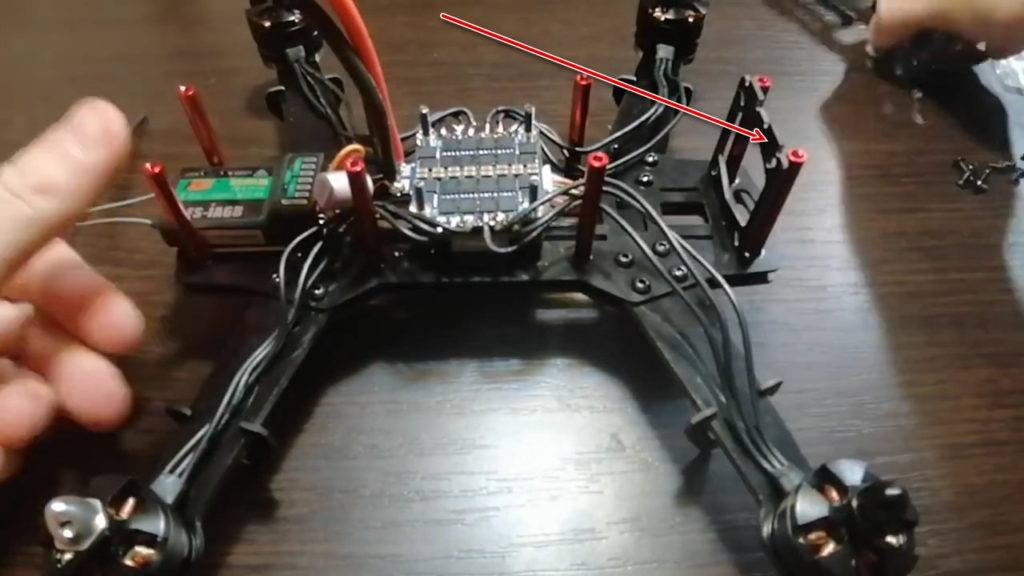
Держатель курсовой камеры нужно установить в переднюю часть рамы.
Осталось одеть на верхнюю палубу четыре резиновых демпфера из комплекта рамы, и на эти демпферы посадить площадку для крепления экшн-камеры. А затем саму палубу поставить на своё место.

Установка верхней палубы и держателя экш-камеры.
Для крепления верхней палубы я не использовал фиксатор резьбы, потому что планирую в ближайшем времени доработать и модернизировать свой квадрокоптер, поэтому мне позже нужно будет её снимать.
У приёмника Fly Sky IA6b есть два антенны, каждая из которых должна быть расположена под углом 45 градусов к горизонту и 90 градусов друг к другу. На раме не было специального крепления для них, поэтому я временно закрепил антенны в подходящие отверстия верхней палубы. Потом придумаю более состоятельный способ.
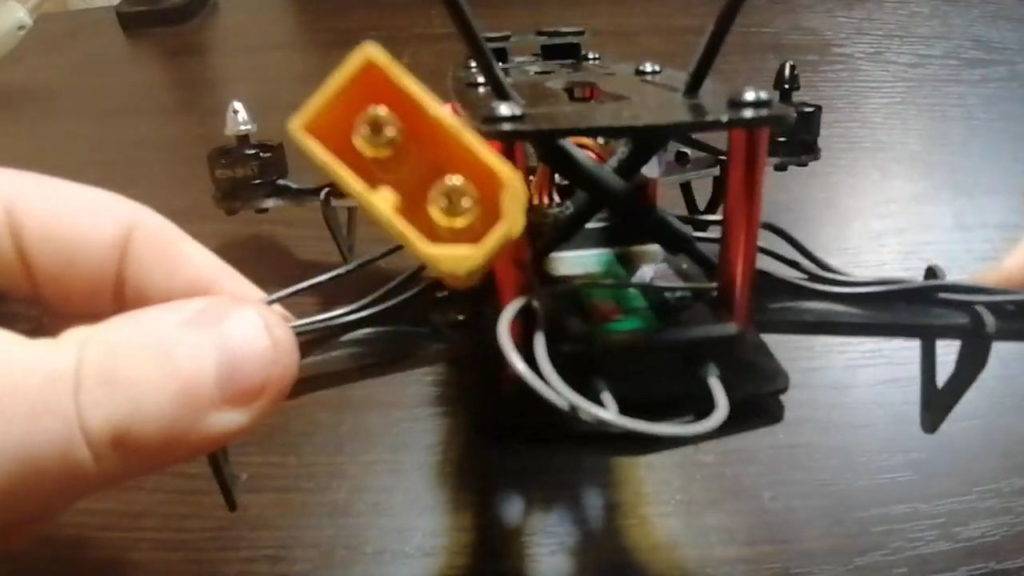
Установка антенн на раму.
Вот и получился у меня гоночный квадрокоптер своими руками. Теперь осталось настроить его так, как будет удобно новичку для постепенного освоения полётов.
Замечания и рекомендации
- Многие регуляторы при включении с высоким уровнем газа входят в режим программирования. Уровень сигнала запоминается как максимальный. При перемещении стика газа с минимальное положение уровень сигнала запоминается как минимальный.
- Если после калибровки моторы не начинают вращаться одновременно или вращаются с разной скоростью, то калибровку необходимо повторить.
- Если не получается выполнить калибровку с использованием контроллера APM, то выполните ее вручную (вторым способом) для каждого регулятора.
- Для некоторых регуляторов процедура калибровки отличается. Читайте документацию по регулятору.
- Для более точной калибровки можно подключить все регуляторы одновременно к приемнику. В этом случае будет исключено влияние «плавания» сигнала аппаратуры.
Как подключить квадрокоптер к смартфону?
Необходимо знать не только, как запустить квадрокоптер Mobicaro или другой, но и как его подключить к смартфону. Современные телефоны (смартфоны) имеют много функций. К ним можно подключать беспилотник и управлять им. Все функции аппарата будут у пользователя в сжатом формате в руках. Для подключения коптера к телефону через Wi-Fi необходимо в его память скачать мобильное приложение (для Android – Google Play, для iPhone – App Store), которое ориентировано на работу с конкретным летательным аппаратом. В инструкции по эксплуатации или на упаковке прибора приводится QR-код для скачивания.
На смартфоне активизируют канал Wi-Fi. Квадрокоптер включают, и обычным образом подключают к раздаваемому аппаратом каналу Wi-Fi. Для выполнения данной операции вводить пароль обычно не нужно. Запускают ранее загруженное приложение.
На экране должны появиться:
- виртуальные стики;
- кнопки;
- служебные мнемограммы.
Если беспилотник оснащен полетной видеокамерой, то данная информация будет указана в виде поступающего с камеры изображения. Далее запускают двигатели и отправляют квадрокоптер в полет.
Преимущество подключения через канал Wi-Fi заключается в том, что на экране смартфона видео передается в реальном времени. Все полетные функции контролируются простыми касаниями экрана. Смартфон понятен практически всем молодым пользователям.
Из недостатков специалисты отмечают малую дальность управления и необходимость регулярного обновления приложения.
Как настроить?
Процесс настройки дрона достаточно сложный и включает в себя множество нюансов, поэтому нужно быть крайне аккуратным
Особенности настройки зависят от целого ряда факторов, среди которых важное значение имеет тип калибровки. Наиболее простой на сегодняшний день считается именно ручная настройка. Для ее проведения достаточно будет найти в инструкции, где находятся крепежные детали для регулировки
Для ее проведения достаточно будет найти в инструкции, где находятся крепежные детали для регулировки.


Процедура занимает достаточно много времени и включает в себя следующие этапы.
- Включение устройства и ожидание его сопряжения с пультом управления.
- Осуществление проверки по сценарию, который рекомендован производителем.
- Подкручивание регулировочного болта на определенной оси.
- Повторение проверки и фиксация полученного результата.
- Настройка квадрокоптера до тех пор, пока не будет получен нужный результат.

Основной минус состоит в том, что при помощи ручного метода достаточно трудно добиться идеального результата, однако, избавиться от определенных неточностей управления можно. Если происходит калибровка при помощи специального программного обеспечения, то придется осуществить всего несколько манипуляций. Производители дрона заранее закладывают в пульт ДУ функции, которые автоматически проводят настройку.











Сборка квадрокоптера
На первом этапе вам нужно правильно собрать дрон, чтобы он не получил повреждения при первом же полете. Сборка подразумевает раскладывание лучей (если они конструктивно раскладываются), установку пропеллеров и защиты, зарядку и установку аккумуляторов в дрон и пульт, а также подключение видеокамеры. В некоторых моделях детали присоединяются болтами, поэтому в комплект может входить отвертка.
В процессе сборки обратите внимание на правильную установку пропеллеров, чтобы не перепутать задние винты с передними. Обычно на основаниях для пропеллеров есть специальные метки, например, белые винты ставятся на белые метки, как в модели. Что касается защиты, то не советуем отказываться от ее установки, если это ваш первый опыт управления коптерами
При получении хорошего навыка пилотирования вы можете в дальнейшем снять ее. Подключение камеры обычно сводится к установке в нее карты памяти (если она не стоит по умолчанию), креплению камеры в корпусе, удалению фиксатора с камеры и стабилизатора (при наличии), снятию защитных чехлов и подсоединению провода
. Что касается защиты, то не советуем отказываться от ее установки, если это ваш первый опыт управления коптерами. При получении хорошего навыка пилотирования вы можете в дальнейшем снять ее. Подключение камеры обычно сводится к установке в нее карты памяти (если она не стоит по умолчанию), креплению камеры в корпусе, удалению фиксатора с камеры и стабилизатора (при наличии), снятию защитных чехлов и подсоединению провода.
Перед первым полетом полностью зарядите аккумулятор дрона и батарею идущего в комплекте пульта управления или смартфона. Для их зарядки могут использоваться как специальные зарядные устройства, идущие вместе с дроном, так и типовые вроде сетевой зарядки для смартфонов. Пульт управления нередко работает от обычных пальчиковых батареек.
Для чего нужна калибровка квадрокоптера

Дрон в полёте может клониться в стороны и крутиться по кругу. Неправильная настройка квадракоптера может привести к несчастному случаю, Вы можете нанести телесные травмы себе и окружающим или испортить чьё нибудь имущество и вся ответственность ляжет на оператора который управлял данным аппаратом. Так что с помощью триммирование квадрокоптера Вы сможете его настроить и избежать непредвиденных ситуаций.
Следует ли калибровать квадрокоптер?
Чтобы это понять, поднимите его на высоту и попробуйте полетать. Команда «вперёд» даёт на дрон сигнал лететь строго вперёд, без наклонов в какие-либо стороны. Точно так же проверить и другие направления. Если нарушения при полёте были выявлены – не стоит откладывать дело в долгий ящик, надо действовать.
Где должна происходить калибровка?
Калибровка квадрокоптера осуществляется на высоте более полуметра. Так и безопаснее, и ничего не мешает. Калибровать удобней всего при безветрии.
Типы калибровки
Существует 3 типа калибровки:
- Механическая – её используют в случае, если отклонение от необходимой оси не слишком большое. Осуществляется путём подкручивания регулятора тяги коптера.
- Автоматическая – осуществляется настройкой аппарата с пульта управления. Нужна, если требуется сместить триммер на 5 позиций или больше. Калибровка зависит от пульта и контроллера, так что без мануала тут не обойтись.
- При помощи программного обеспечения mission planer. Программа заточена для работы с платами Ardupilot. Все необходимые настройки задаются программно. Обычно производится перед первым полётом собранного дрона.
Для калибровки выполните следующие действия

- Включите передатчик радиоуправления (само радиоуправление должно быть отлажено). Выставьте ручку газа на всю.
- Возьмите Li-Po аккумулятор и подключите к разъёму Power-модуля, чтобы включить автопилот.
- Далее APM начнёт моргать красными и синими светодиодами. Это значит, что он готов для калибровки после следующего включения. Отключите аккумулятор от APM.
- Опять включите питание. Регуляторы издадут стандартный сигнал (число сигналов равно числу банок в батарее), а после издадут двойной короткий сигнал, подтверждающий калибровку по максимальной скорости.
- Опустите ручку газа до минимального положения. Один длинный сигнал – откалибровано по минимальной скорости.
- Теперь регуляторы для APM8 успешно откалиброваны. Можете проверить работу моторов.
- Уберите газ на минимальное состояние и выключите питание Ardupilot.