Часто задаваемые вопросы
Какова причина того, что щетка робота-пылесоса начинает вращение в обратном направлении?
Изменение направления и скорости вращения — это попытка интеллектуальной системы управления освободить робота от запутывания. Иногда, таким образом робот реагирует на высокий ворс коврового покрытия пола.
Возникновение такой реакции робота на ровном полу — признак того, что щетки нуждаются в чистке.
Какова причина того, что робот издает звуки, напоминающие щелчки?
Звук щелчков, издаваемый роботом-пылесосом сигнализирует о попытке интеллектуальной системы управления освободить робота от запутывания, изменив направление вращения щеток.
Возникновение такого звука, издаваемого роботом на ровном полу — признак того, что щетки нуждаются в чистке.
Почему в процессе движения робот не определяет наличия на пути некоторых помех?
Интеллектуальная система управления роботом-пылесосом, получая информацию от датчиков, расположенных на корпусе, своевременно определяет наличие преград по ходу движения, уменьшает скорость движения робота и касание с преградами происходит очень мягко, а затем — изменяет траекторию движения. Темные цвета покрытия пола могут понизить качество определения преград.
Требования к безопасности
НЕЛЬЗЯ ВСКРЫВАТЬ КОРПУС ЭЛЕКТРОННЫХ БЛОКОВ И АККУМУЛЯТОРНОЙ БАТАРЕИ РОБОТА-ПЫЛЕСОСА, ЗАРЯДНОГО УСТРОЙСТВА. ИХ СОДЕРЖИМОЕ НЕ ПОДЛЕЖИТ НИКАКОМУ РЕМОНТУ ИЛИ ТЕХНИЧЕСКОМУ ОБСЛУЖИВАНИЮ.
ТЕХНИЧЕСКОЕ СОПРОВОЖДЕНИЕ РОБОТА-ПЫЛЕСОСА СЛЕДУЕТ ПОРУЧАТЬ ТОЛЬКО СПЕЦИАЛИСТАМ СПЕЦИАЛИЗИРОВАННОГО СЕРВИСНОГО ЦЕНТРА.
ПЕРЕД НАЧАЛОМ ЭКСПЛУАТАЦИИ РОБОТА-ПЫЛЕСОСА СЛЕДУЕТ ПРОВЕРИТЬ СООТВЕТСТВИЕ НАПРЯЖЕНИЯ ЗАРЯДНОГО УСТРОЙСТВА И НАПРЯЖЕНИЕ В СЕТИ ПОДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ.
Игнорирование правил техники безопасности при использовании робота-пылесоса Roomba и неосторожное обращение с ним, может стать причиной травм и повреждений
Инструкции по общим вопросам
Обязательно следуйте всем инструкциям, прилагаемым к роботу-пылесосу
Обязательно обратите внимание на предупредительные надписи, нанесенные на корпус робота-пылесоса и иное оборудование, поставляемое с ним в комплекте
Поручите работы по обслуживанию робота-пылесоса, выходящие за рамки рекомендованных для пользователя, квалифицированным специалистам специализированных сервисных центров.
Инструкции, касающиеся вопросов эксплуатации
- Робот-пылесос нельзя использовать вне помещений.
- Робот-пылесос не является игровым или развлекательным устройством и не предназначен для транспортировки каких-либо предметов или катания людей. При проведении уборки роботом-пылесосом в помещении, находящиеся там малолетние дети и домашние питомцы должны быть под присмотром взрослых людей.
- Нельзя эксплуатировать робота в помещениях с повышенной влажностью или на мокром или влажном покрытии пола.
- Уход за роботом должен быть проведен с помощью сухого и чистого протирочного материала.
- Нельзя использовать робот-пылесос для уборки горящего, тлеющего, химически активного мусора или жидкостей.
- Перед началом уборки помещения с помощью робота-пылесоса, следует убрать с пола разбросанные предметы, хрупкие предметы интерьера, свисающие на пол или лежащие там шнуры и провода.
- Необходимо, чтобы робот-пылесос не имел возможности физически проникнуть в такие опасные области, как балкон или лестничная площадка.
- Следует, предварительно зарядив, извлекать аккумуляторную батарею из корпуса робота, если необходимости в его помощи не возникнет в течении длительного промежутка времени.
- Робот-пылесос не может быть передан в управление людям с ограниченными возможностями, рядом хронических заболеваний без контроля со стороны взрослых людей.
- Робот-пылесос не является игровым или развлекательным устройством.
Комплектность и зарядка аккумуляторных батарей
- Для процедуры зарядки аккумуляторных батарей робота-пылесоса следует использовать только стандартную сеть электрического снабжения. Использование дополнительных преобразующих устройств лишает вас гарантийных обязательств со стороны производителя.
- Для зарядки аккумуляторных батарей робота-пылесоса следует использовать поставляемое в комплекте, технически исправное и неповрежденное устройство для зарядки.
- Зарядка аккумуляторных батарей происходит исключительно в помещениях.
- На случай возникновения резких перепадов электрического напряжения в сети электрического снабжения, робот-пылесос оснащен стабилизирующим устройством.
Что пригодится для сборки?
Перед тем как самостоятельно изготовить автоматизированную технику следует обзавестись всеми нужными материалами и схемой сборки. В интернете есть достаточно много видео, обучающее робототехники. Рассмотрим подробнее список необходимых материалов, и как все-таки собрать агрегат самостоятельно.
Материалы необходимые для самостоятельной сборки пылесоса:
- мозг системы;
- 4 ИК, для обнаружения препятствий на воем пути;
- 2-3 вращающих аксессуара;
- переключатели, которые необходимы для изменения траектории движения во время столкновения;
- модель для контроля движения передней щетки;
- преобразователь тока;
- драйвер моторов;
- мотор, отвечающий за вращение щетки;
- редуктор;
- Li ion блок;
- изготовленный корпус робота;
- основание из фанеры;
- несколько магнитов, обеспечивающих крепление;
- клей, саморезы;
- провода, переключатели, кабели и т.д.
Схема
Для того, чтобы сделать робот, который ничем не будет отличаться от промышленной модели. Процесс программирования производится через ПК, следует загрузить код на плату. Существует большое множество различных планов роботизированной модели. Схема робота пылесоса:
- Берем основание из фанеры, к нему крепим с помощью клея — двигатель, пылесборник, кулер, микросхема, аккумулятор, ИК лазеры передвижения. Стоит не забывать что у пылесборника должна быть трубка, позволяющая воздуху выйти наружу. Колеса решили взять уже готовые, то просто крепим к основанию.
- Установить бампер. Его можно сделать из металлического материла, главным критерием является воздействие контактного аксессуара на переключатель, заставляющий двигаться его назад, в противоположную сторону от препятствия.
- Далее устанавливаем корпус, следует заметить, что корпус крепится с помощью магнитов. Чем выше количество используемых магнитов, тем прочнее корпус будет держаться. Лучше всего подойдет корпус из поливинилхлорида.
Подробнее о процессе сборки
Теперь детально рассмотрим проект сборки:
- Корпус изготавливается из картона, либо поливинилхлорида.
- Закрепляем на корпусе ИК лазеры и контактный аксессуар;
- Пылесборник изготавливается из картона или поливинилхлорида;
- Для фильтра подойдут тканевые или микрофибровые салфетки;
- Двигатель подключается к ардуино;
- ИК аксессуары подключаются к контроллеру;
- Устанавливаются батареи;
- Устанавливаем щетки;
- Далее следует процесс программирование;
- Устанавливаем верхнюю крышку и проверяем целостность робота.
Необходимые инструменты и материалы
Для изготовления самодельной конструкции требуются материалы и набор инструментов. Они следующие:
Контролер типа Arduino с соответствующими драйверами. Этот элемент можно приобрести в специализированном магазине. Контроллер после установки рекомендуется защитить от воздействия окружающей среды.
Лист фанеры применяется для создания основания. В некоторых случаях изготавливается корпус из поливинилхлорида, т. к. этот материал более надежный в применении.
Для обеспечения подвижности устанавливается 3 колеса. Они должны быть небольшого размера, поверхность изготавливается из материала с высокой степенью сцепления.
Провода сечением 0,75 мм² нужны для соединения отдельных элементов. Компактность конструкции определяет то, что требуется относительно небольшое количество провода.
Блок питания представлен 4 аккумуляторами по 18V
Также уделяется внимание тому, какие используются зарядные устройства. На момент работы источник питания может нагреваться до высокой температуры
Поэтому батареи должны быть изолированы от других материалов.
4 инфракрасных и 2 контактных датчика используются для определения положения устройства. Инфракрасные размещаются по периметру, контактные располагаются внутри бампера.
Клей, саморезы и другие крепежные элементы.
Набор отверток, паяльник, нож, карандаш, шуруповерт и некоторые другие инструменты.
Картонный элемент изготавливается для получения основания. Щетки по бокам существенно повышают эффективность создаваемого устройства,
Перечень конструктивных самодельных СП
Чтобы соорудить собственными усилиями стройпылесос, нужно иметь в наличии электрический силовой агрегат. Минимальный параметр его оборотов в минут должен составлять 6000. Подобный механизм можно взять из таких видов техники:
- неиспользуемого пылесоса,
- стиральной машинки,
- компрессора холодильного механизма.
Допускается применение в данной конструкции электрических приводов от кухонных агрегатов. Но у них есть одна значительная слабость – они довольно стремительно перегорают. Причина: они не адаптированы для очень продолжительных и интенсивных нагрузок.
Решив дилемму с приводом, необходимо грамотно подобрать два важных элемента:
- Контейнер. Требование к нему — мощная герметичность.
- Вентилятор. Его ключевая функция – охлаждение.
Корпус нуждается в качественном базисе. Эту функцию может выполнить ведро. Подходят варианты из пластика и металла. На дне обязательно делается отверстие. Это гарантия забора необходимого воздуха.
Для собирания мусора требуется контейнер. Здесь можно применить традиционный контейнер или циклонный отсек. Самой оптимальной в плане удобства считается конструкция со вторым вариантом.
Рекомендуется использовать специальную пылесосную гофру. Применение другой вариации гофры приводит к тому, что агрегат работает с повышенным шумовым уровнем.
Аппарат самостоятельного производства способен собрать порядка 95% от совокупного объема пыли.
Для подобной строительной техники оптимально задействовать двигатель высокой мощности, чтобы максимально эффективно и безопасно убирать очень вредную пыль. Однако стоит учитывать еще один важный аспект — уровень разрежения, который образует аппарат.
Для мусоросборников лучше всего подходят контейнеры средних параметров. Варианты с большими габаритами на практике проявляют себя малоэффективно.
В агрегате, созданном самостоятельно, обязательно устраивается мощный фильтр. Он поможет очень качественно очищать воздух.

В сборочном процессе важно ориентироваться на правильные схемы и чертежи. Например, если основная задача – очищать помещение от цементной и бетонной пыли, можно пользоваться подобной схемой:. Также строительный агрегат можно приобрести
Лучше взять модификацию с металлическим корпусом. Строительные аппараты, которые делают заводские специалисты, всегда в комплекте имеют набор специальных насадок
Также строительный агрегат можно приобрести. Лучше взять модификацию с металлическим корпусом. Строительные аппараты, которые делают заводские специалисты, всегда в комплекте имеют набор специальных насадок.
Их число и разнообразие обуславливают эффективность и производительность такого вида пылесоса.
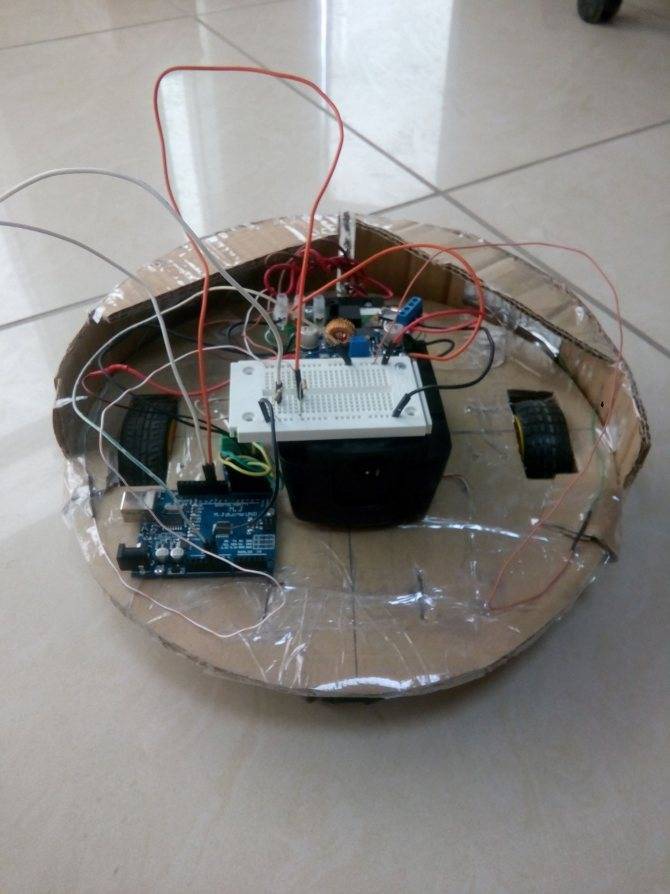
Идея №1: робот-пылесос из картона
Основа робота делается из плотного картона. Его лучше склеить в пару слоев, а волокна разместить перпендикулярно. Для его технической начинки нужен такой набор деталей:
- Любая плата Arduino.
- Breadboard или простая макетная плата, в принципе можно и без неё, всё просто спаять.
- 2 ультразвуковых датчика расстояния (дальномер).
- Турбина от пылесоса.
- Небольшой двигатель или кулер от компьютера.
- Двигатели с редукторами и колеса.
- Контроллер для двигателя.
- Провода для соединений схемы.
- Аккумуляторы и контроллер заряда.
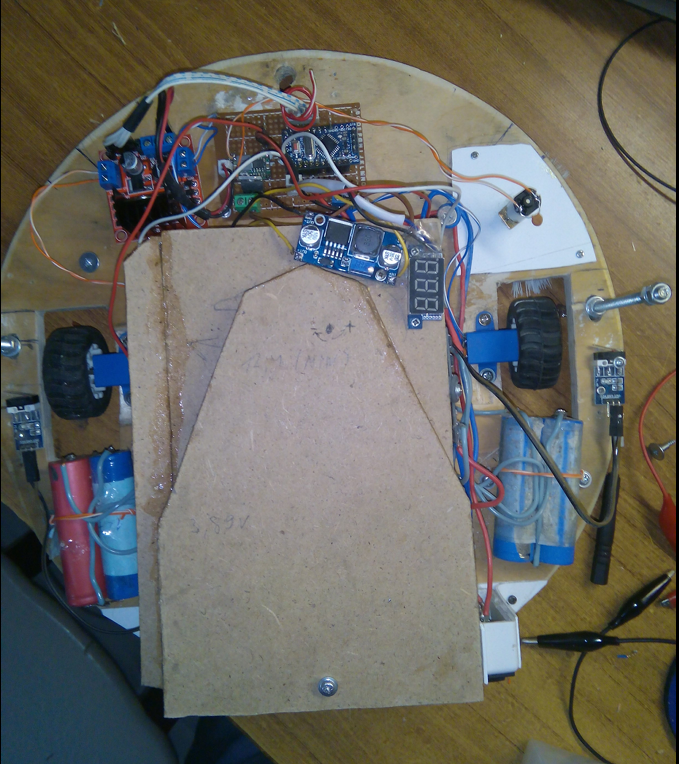
В качестве питания для робота нужно использовать 3 литиевых аккумулятора. Напряжение каждого из них 3,7 В. Для их заряда нужен контроллер. Например, такой как на фото:
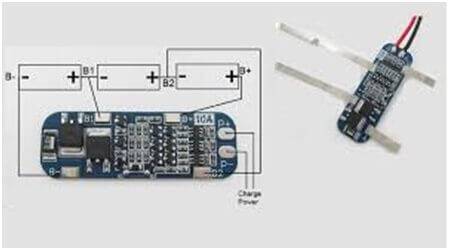
Контроллер
Для управления двигателями привода робота удобно использовать модуль на L298-микросхеме. Схемотехнически это H-мост, вы можете его собрать своими руками из отдельных компонентов, но купить готовую плату будет надежнее. С его помощью вы можете задавать скорость движения робота-пылесоса и изменять направление вращения.
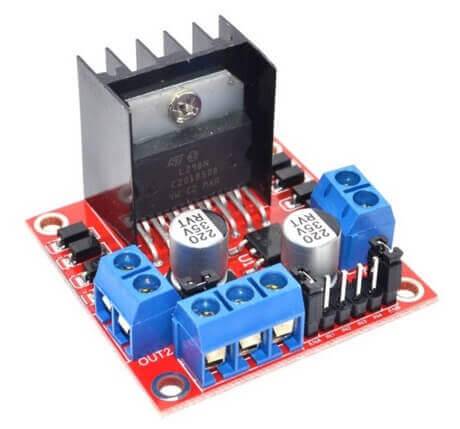
Модуль управления
Для регулировки скорости на пин ENA или ENB подаётся ШИМ сигнал, а для задания направления вращения подают разноименные сигналы на IN1 и IN2 для одного двигателя и IN3, IN4 для другого двигателя. При этом если на пине IN1 у нас логическая единица, а на пине IN2 – логический ноль, двигатель крутится в одну сторону, чтобы сменить направление нужно поменять местами 1 с 0. Его нужно собрать с ардуино по такой схеме (пины можно использовать любые, это вы укажете в скетче).
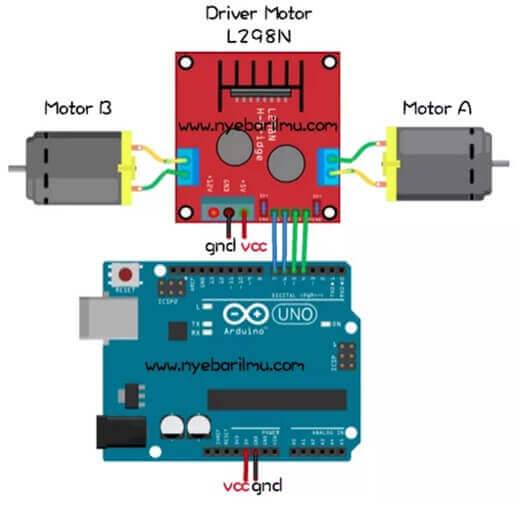
Схема на ардуино
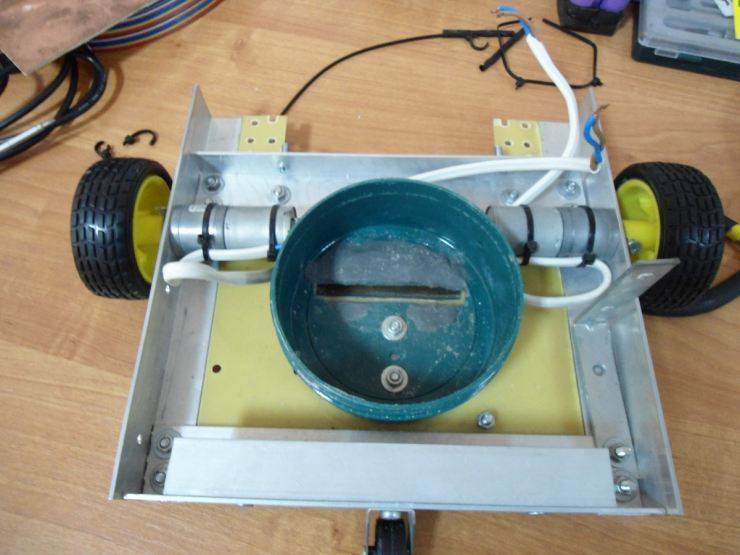
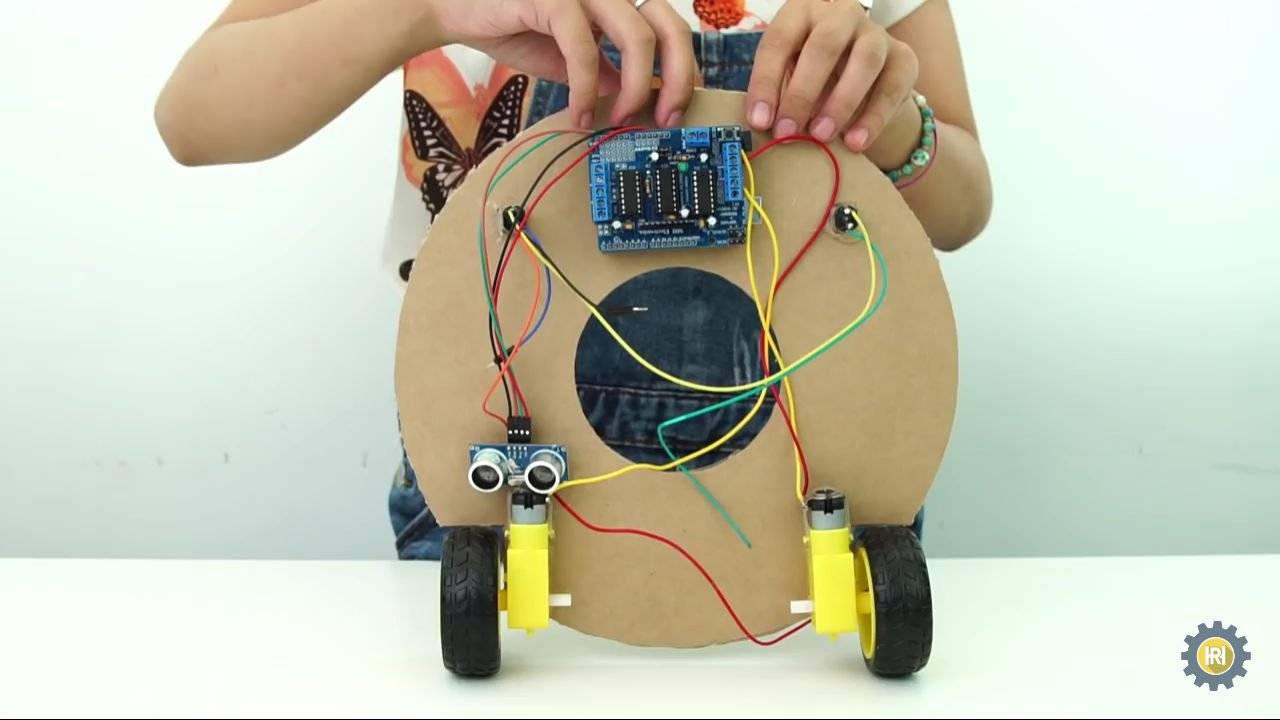
Далее нужно делать основу из картона и закрепить на ней колеса, должно получиться что-то вроде этого:

Основа из картона
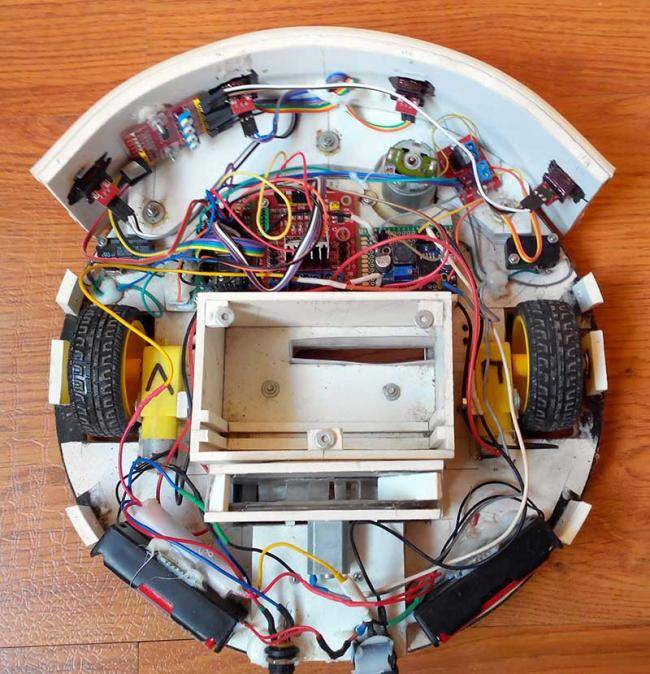
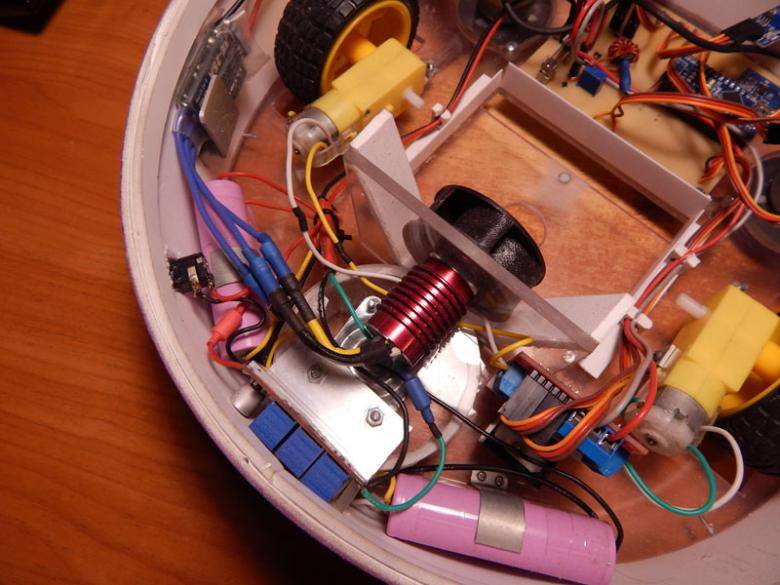
Вот вид с нижней стороны. Два ведущих колеса с угловым редуктором и поворотное колесо:

Колесная база
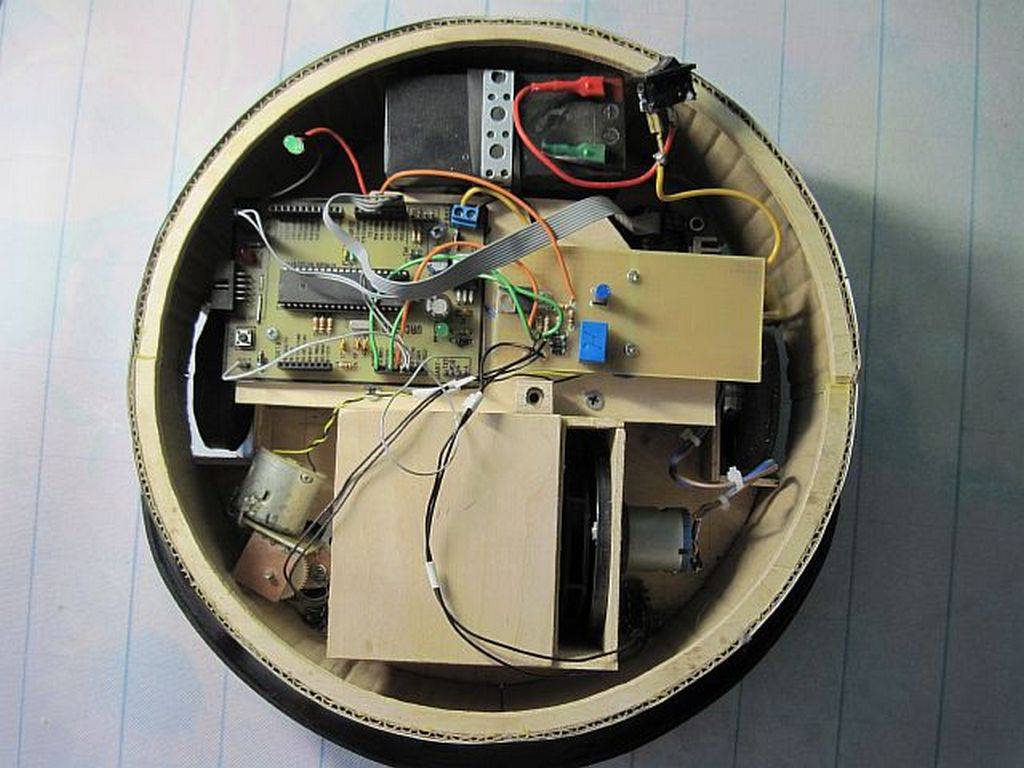
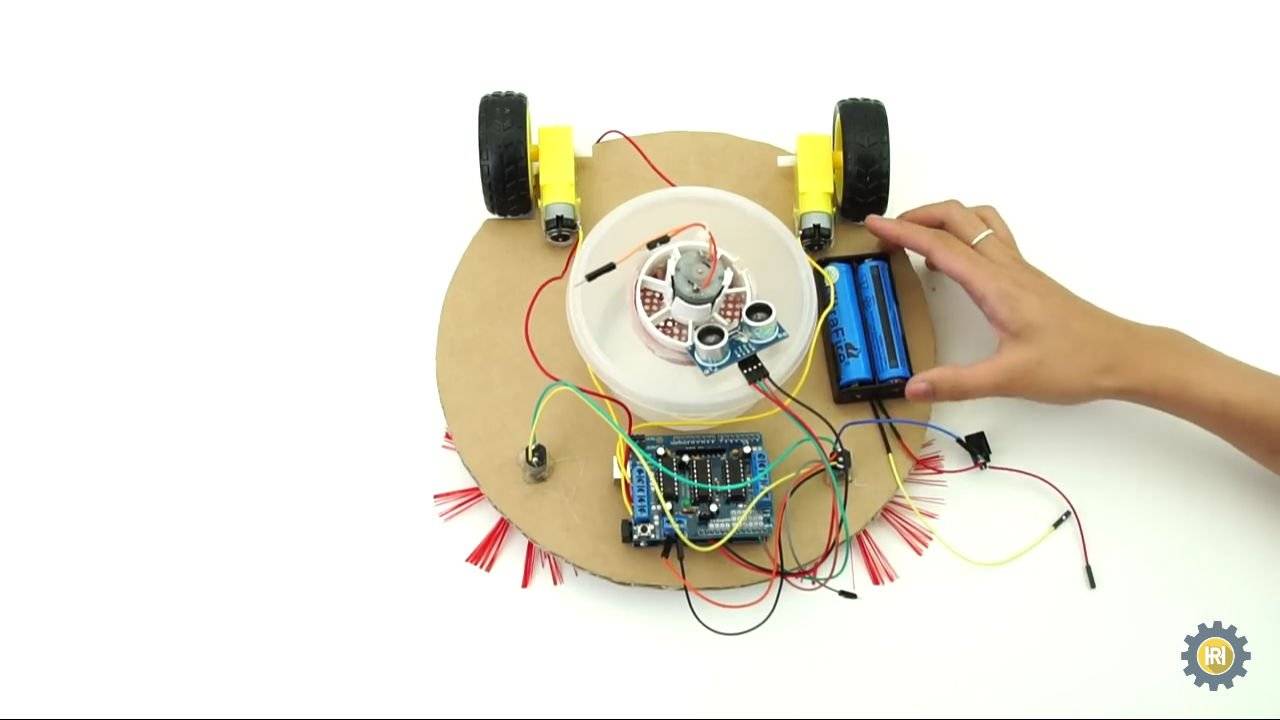
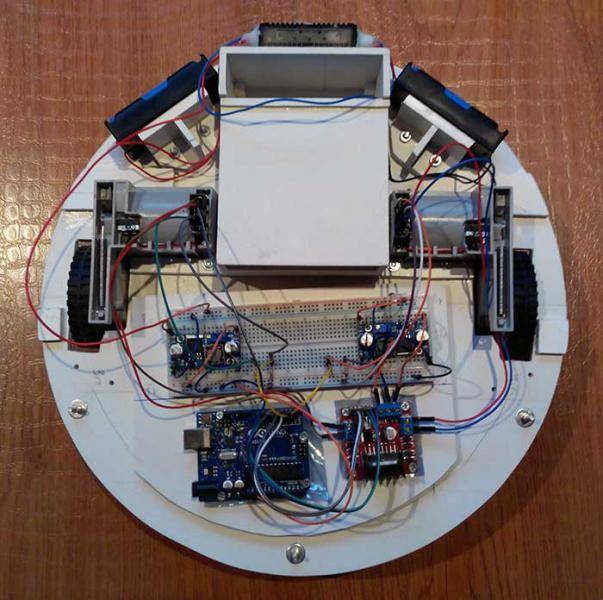
Теперь нужно собрать схему, которая монтируется на основание. Диаметр основания должен быть около 30 см, чтобы туда влезла и электроника и сам блок пылесоса.
Сборка корпуса
Вместо дальномеров можно использовать вариант с бамперами, которые соединены с концевыми выключателями. При столкновении с препятствием система управления даст сигнал о смене направления движения.

Бампер
Контактные бампера можно сделать и своими руками, для этого нужен тонкий, но жесткий провод, например от витой пары. Для этого формирует контактную площадку на внутренней стороне бампера из фольги, и закрепляем проводник как это показано ниже. При столкновениях робота-пылесоса с мебелью и стенами они будут соприкасаться. Вам остается отрегулировать расстояние от проволоки до фольги, чтобы добиться нужной чувствительности и исключить ложные срабатывания. На фольгу подается 5В, а провод идёт на вход Ардуино, подтянутый к минусу через резистор на несколько кОм.

Самодельный контактный бампер
Устройство питается от аккумуляторов, для питания системы управления можно применить линейные стабилизаторы типа l7805. Чтобы отрегулировать скорость вращения моторов подойдет понижающий преобразователь, например LM2596.
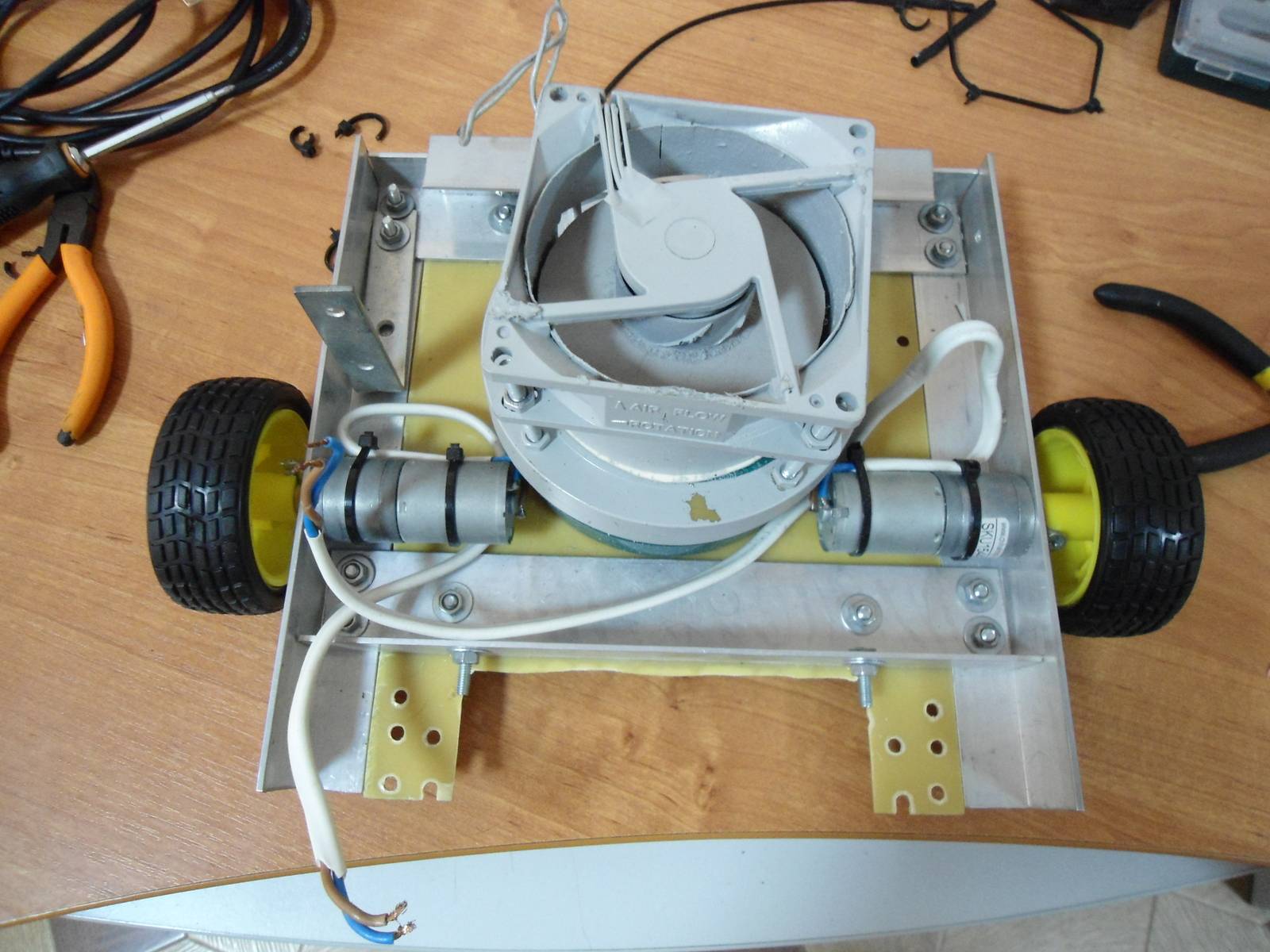
Самое сложное — это сконструировать и собрать пылесос. Вот его приблизительный чертеж:
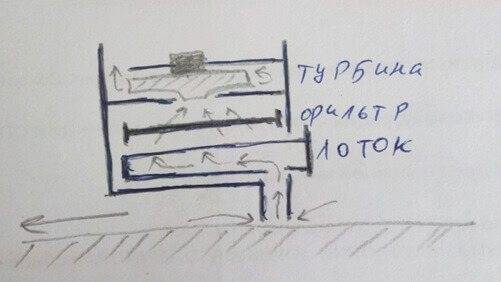
Схема пылесоса
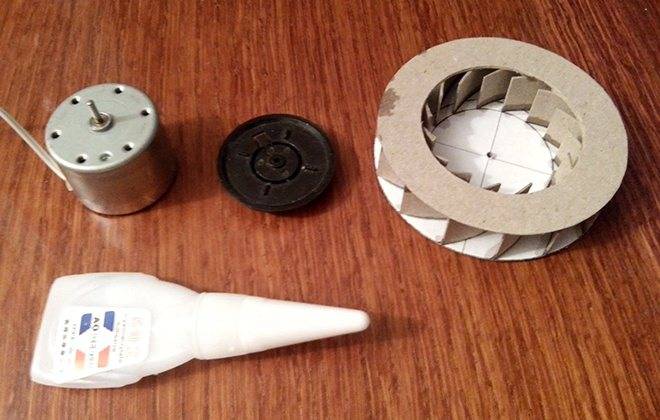
Отламываем родные лопасти от кулера, и закрепляем на его роторе турбину от пылесоса
Важно закрепить турбину точно в центре, иначе вы получите дисбаланс и вибрации

Турбина робота
Вот так выглядит обратная сторона турбины, закрепленной на роторе кулера. Закрепить её можно на термоклей или на суперклей

Вид турбины изнутри
Вот и вся пошаговая инструкция по сборке робота-пылесоса, сделанного из подручных материалов. Алгоритм его работы такой: робот-пылесос едет вперед, пока не встретит препятствие. После столкновения (или приближения, если вы используете УЗ дальномеры) останавливается, отъезжает назад на заданное расстояние, разворачивается на произвольный угол и едет дальше.





Способы обеспечения движения, уборки и питания робота-пылесоса
Движение роботизированного устройства в общем случае осуществляется двумя способами: по спирали (с центра наружу) и зигзагами. В микроконтроллеры можно также занести и схемы комнат по отдельности.
Пространственную ориентацию, объезд препятствия на пути следования пылесос осуществляет благодаря встроенным контактным и инфракрасным датчикам — они образуют систему обратной связи. Инфракрасные регулируют движение, определяя расстояние до стен, предметов, перепады высот. Контактные датчики срабатывают в бамперах при ударах о препятствия (подробнее о том, как работает прибор — в статье принципы работы роботов пылесосов).
Автоматизированный пылесос с автономным источником питания, конечно же, не развивает такую мощность всасывания, как ручной вариант. Практические испытания показали большую эффективность использования маленькой щетки совместно с всасывающей турбиной. Для уборки по углам передняя часть пылесоса оснащается 2 щетками, которые при работе подгребают мусор к главной.
Питание роботизированной системы можно осуществлять от нескольких аккумуляторов, напряжение на клеммах которых – 12 V (18 V), а его емкость равняется 7 А*ч. Зарядка осуществляется при прямом контакте либо беспроводным способом. Применение последнего увеличивает расходы на комплектующие детали.
Самостоятельный возврат робота к месту зарядки – сложная задача, которую можно решить установкой передающего маяка.
Любая автоматизированная модель собирается на базе контроллера (мозга системы). Поэтому следует изучить язык его программирования для занесения алгоритма команд. Следует также учитывать интуитивную направленность командного интерфейса, что значительно облегчает процесс. Как микроконтроллер, так и используемые датчики часто имеют стандартизированные разъемы для подсоединений, поэтому пайка требуется редко.

Описание самодельного робота пылесоса
Если вы хотите создать механизм, который будет идеально подходить для очистки поверхностей пола в вашем доме, вам следует внимательно соблюдать все правила, которые предписывает схема сборки, представленная в следующем пункте.
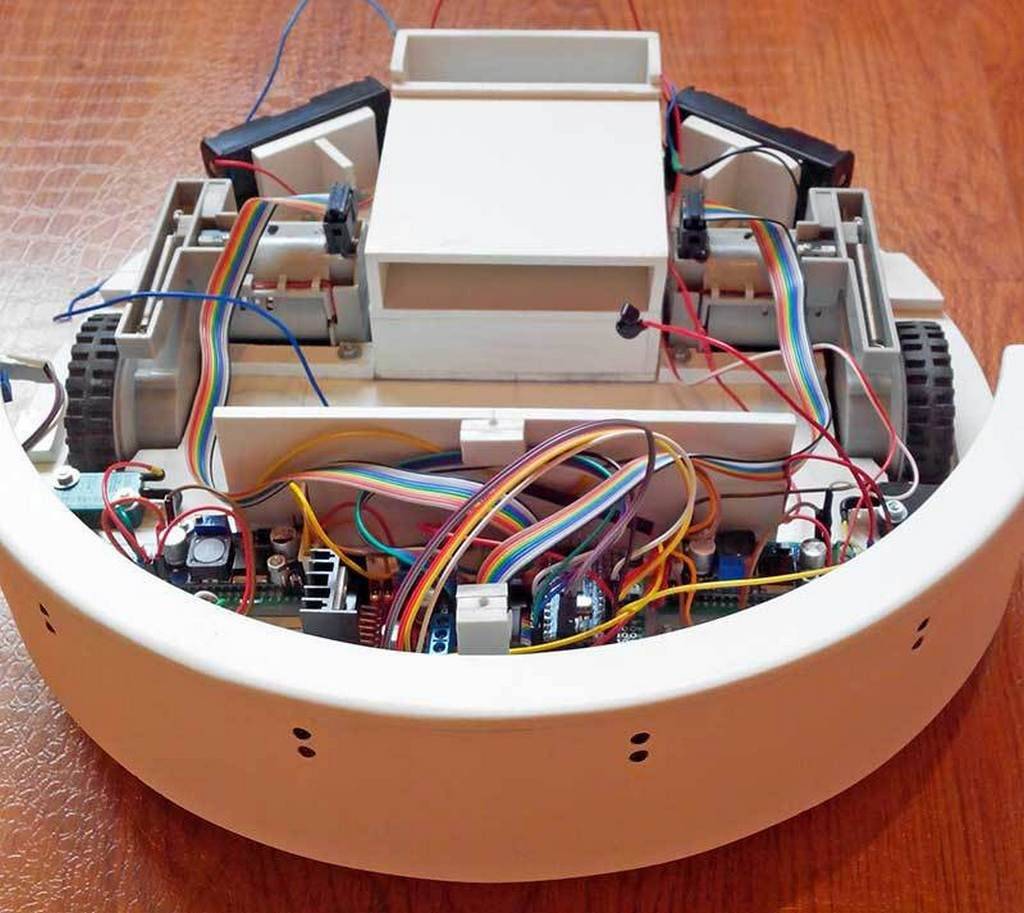
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;

- инфракрасные датчики имеют 4 выхода подключения к системе «Ардуино». При этом обычный режим работы подразумевает выдачу логической единицы, а ситуация, в которой хотя бы один из датчиков системы срабатывает — логический ноль;
- если ИК-датчик не сработал, а пылесос тем не менее наткнулся на какое-либо препятствие, его бампер нажмет на переключатель, что спровоцирует откат устройства на несколько сантиметров назад. После этого будет произведен разворот, а работа продолжится. Переключатели при этом нужны достаточно мощные, чтобы своевременно устанавливать бампер в исходное положение;
- мотор, отвечающий за движение передней щетки, подключается в Arduino через MOSFET. При этом в том случае, когда робот-пылесос находится в движении, щетка вращается достаточно медленно для того, чтобы пыль, грязь и мусор не разбрасывались по комнате, а, наоборот, собирались вместе и втягивались в жерло. А если робот находится возле стены или угла, щетка ускоряет темп своей работы, так как большинство пыли и грязи как раз и скапливается вдоль плинтусов;
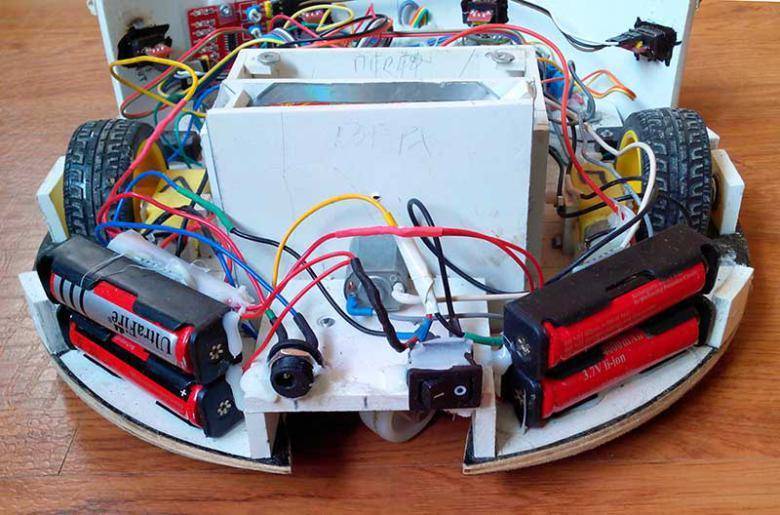
- питание робота пылесоса осуществляют 4 литийионных аккумулятора, а также понижающий преобразователь переменного тока. Каждая пара вышеупомянутых литийионных аккумуляторов подключена последовательно;
- основание устройства изготовлено из высокопрочной фанеры;
- конструкция устройства подразумевает наличие 3 шариковых колес;
- все щетки робота-пылесоса изготовлены из достаточно жесткой лески.
Вид, дизайн
Форма, конечно же, традиционная для умных пылесосов — плоский диск. Цвет — светло-черный или серый со слабой имитацией узора древесины, по торцам — темно-серый с синевой. Днище, отдельные элементы на торцах — черные (Tesvor X500 Pro может быть белым с черными вставками).

Корпус матовый, не глянцевый, поэтому не маркий, пыль на нем, отпечатки пальцев и прочие загрязнения не будут бросаться в глаза.

Дизайн у роботизированных уборщиков, как правило, в русле техноминимализма, тут этот стиль выражен усиленно.

На верхней панели только одна кнопочка старта/паузы (не вкл./выкл. питания, которая на торце), и она максимально уменьшенная: около 1.5 см в длину и 5 мм в ширину. Из графических обозначений лишь индикатор-значок сигнала Wi-Fi и фирменный логотип-надпись с названием бренда. То есть нажать ногой на данную кнопку будет сложно.
Днище черное, по периметру спереди такие же резиновые бамперы-амортизаторы для смягчения толчков. На задней части кромки — посадочное место для пылесборника или бака для воды. Сбоку от него простой выключатель питания, разъем для штекера адаптера питания.

Днище:

Элементы конструкции и управления:
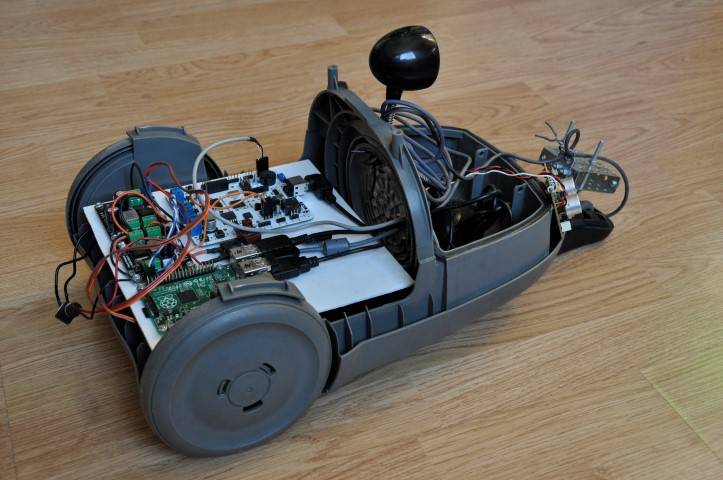
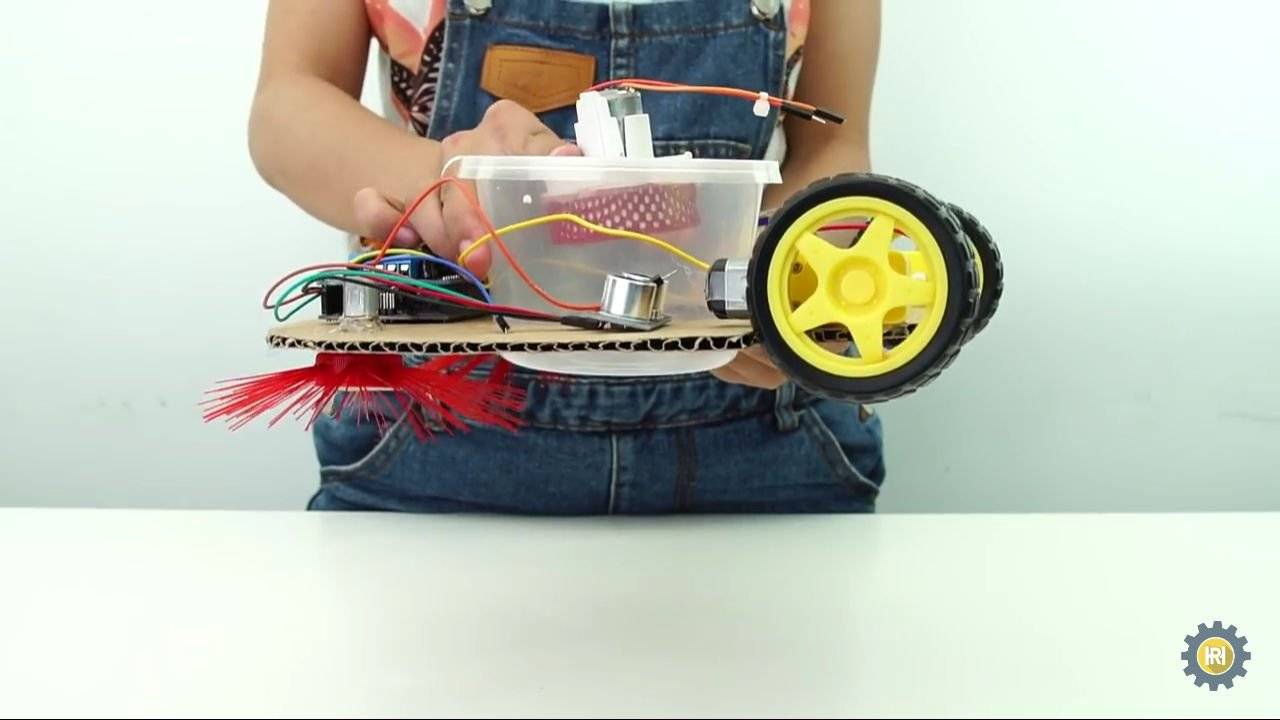
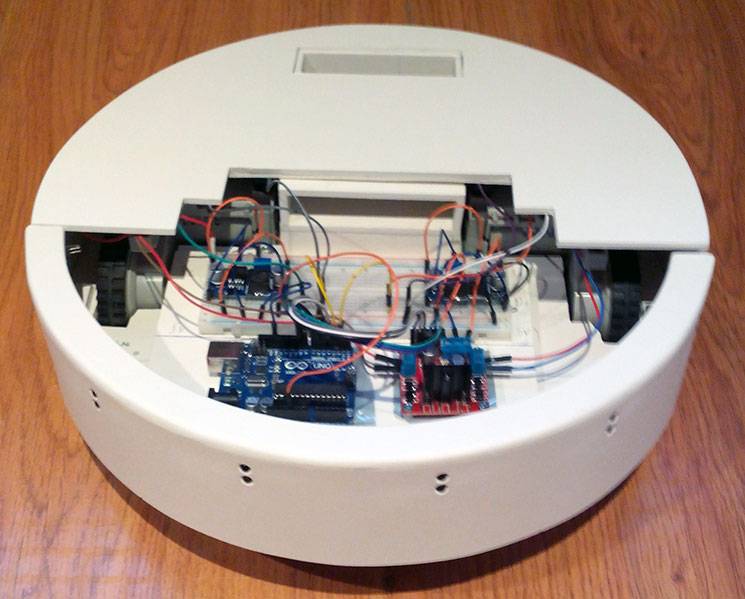
Идея №2: почти заводской робот
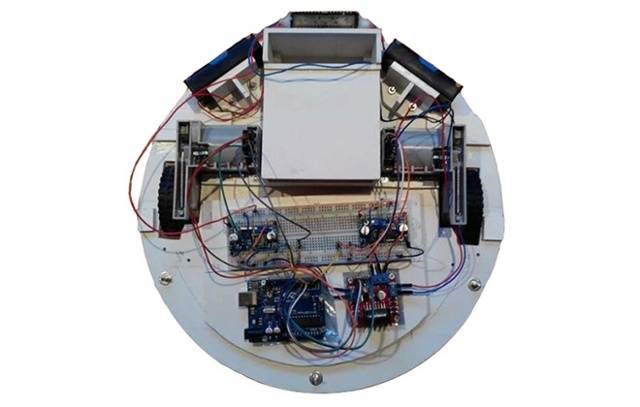
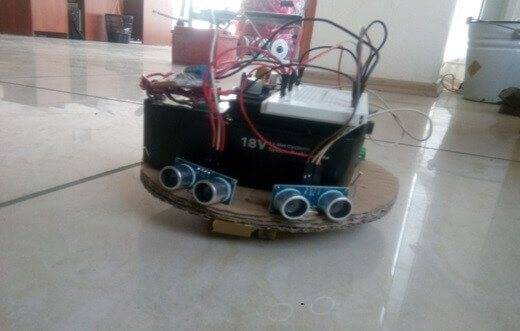
Предлагаем вашему вниманию не более сложный проект робота-пылесоса. Вот его внешний вид в собранном состоянии:
Самодельный роботизированный пылесос
Система навигации в нем собрана из комплекта 6-ти ИК-датчиков препятствия. На случай, если не сработал ни один из них, то предусмотрены два контактных датчика (концевых выключателя). Система управления двигателями на таком же драйвере с микросхемой L298N. Для его сборки вам понадобится:
- Плата Ардуино, в оригинале использовалась Pro-mini.
- USB-TTL переходник для прошивки этой модели ардуино. Если вы будете использовать Arduino Nano, то он не нужен, т.к. в ней есть возможность прошивки по USB.
- Драйвер для моторчиков L298N.
- Моторчики для колес с редуктором.
- 6 ИК-датчиков.
- Моторчики для турбины (по возможности помощнее).
- Крыльчатка турбины пылесоса.
- Моторчики для щеток могут быть любыми.
- 2 датчика столкновения.
Всё это собрать по такой схеме:
Схема сборки робота-пылесоса
Для сборки цепи питания робота-пылесоса нужны:
- 4 литиевых аккумулятора, подойдут типа 18650.
- 2 преобразователя постоянного напряжения (повышающий и понижающий).
- Контроллер для заряда и разряда 2-х аккумуляторов (искать в интернете по запросу 2s li-ion controller). В схеме используется последовательное включение двух параллельно включенных банок, в итоге их выходное напряжение получается больше 7,4В, а параллельная цепочка нужна для повышения ёмкости и автономности работы.
Вот схема питания этого робота:
Схема питания
Кроме этого нужен пластик (ПВХ) или любой другой материал для корпуса робота, можно его распечатать на 3D-принтере, если у вас есть такая возможность.
Для работы самоделки нужна прошивка, вот пример алгоритма хаотичной уборки, мы взяли его с сети. Ссылка для скачивания скетча: прошивка для робота-пылесоса.






В этой статье были рассмотрены 2 конструкции робота-пылесоса, которые можно повторить и собрать своими руками. Сделать автоматическое средство для уборки помещения можно, вложившись в бюджет от 30 до 100 долларов. Самыми дорогими деталями являются аккумуляторы, двигатели и платы ардуино. Если у вас получилось собрать самодельный робот-пылесос или вы придумали другую конструкцию, присылайте примеры в комментарии, будем рады открытому общению!
Напоследок рекомендуем просмотреть видео, на которых наглядно демонстрируется еще несколько идей, как сделать робот-пылесос в домашних условиях:
Теги
сделать, робот-пылесос, своими, руками, идеи, сборки
12-02-2019, 10:26
Умение программировать роботов требует понимания и представлений о соответствующих языках. Начать…
16-01-2019, 18:28
Во всём мире люди тратят на уборку в среднем более трех часов в неделю. Одна из самых…
4-12-2018, 14:32
Робот-пылесос становится барменом (+ видео)
Пивоваренная компания Stella Artois разработала автоматизированную робо-технологию (Bartending…
23-04-2016, 16:02
На Indiegogo принимают заказы на первую партию конструкторов для самостоятельной сборки…
8-12-2015, 14:11
Робот, похожий на пылесос, собирает мячи для гольфа (+ видео)
Бродить по тренировочному полю для гольфа, собирая нескончаемую россыпь мячей, это довольно трудная…
23-12-2015, 17:13
Новейший роботизированный пылесос от LG, известный как Hom-Bot Turbo+, будет иметь впечатляющий…
13-03-2018, 09:38
Новое видео на YouTube демонстрирует мировой рекорд по скорости сборки роботом кубика Рубика. Новое…
19-01-2015, 09:27
Подготовка к практической реализации проекта
Рассмотрим применение вышеизложенных принципов на базе платформы Arduino Mega 2560. Процесс создания будет состоять из нескольких этапов:
- подготовка инструментов и материалов;
- изготовление корпуса с колесами и отделом под мусор, пылесборника и турбины;
- монтаж датчиков и микроконтроллера, моторов с редукторами, аккумулятора, щеток;
- выполнение электрических подключений;
- введение программы в Arduino, определение согласованности датчиков;
- проверка работоспособности робота-пылесоса и его способности заряжаться самостоятельно.
Идея реализуется с помощью следующих материалов и инструментов:
- контроллер Arduino – 1 шт, с драйверами;
- лист фанеры (либо плотный картон) – 1 м.кв;
- колеса – 3 шт;
- провод сечением не более 0,75 мм.кв (подойдет витая пара) – около 2 м;
- блок питания – 4 аккумулятора по 18 V, индикатор заряда к ним, зарядное устройство;
- инфракрасные датчики – 4 шт, контактные – 2 шт;
- электродвигатели: для турбины – 1 шт, вращающий щетку – 1 шт, 2 мотора с редуктором обеспечивают передвижение;
- поливинилхлоридный корпус – 1 шт;
- клей – 1 упаковка, саморезы – 10 шт, скотч – 1 шт, набор магнитов;
- набор отверток и сверл, плоскогубцы, нож канцелярский, карандаш, линейка, шуруповерт, электролобзик.