Что нужно знать перед запуском дрона?
Прежде, чем рассматривать, как найти устройство, стоит узнать, какие меры можно предпринять, чтобы уменьшить вероятность его потери.
Перед включением нужно:
- разобраться с инструкцией, характеристиками;
- научиться управлять;
- четко знать для чего предназначены кнопки на пульте.
Подключить его к смартфону (при наличии этой функции). Обязательно полностью зарядить батарею. В большинстве моделей есть режим обучения для новичков, также включены все возможные ограничения, потому он не полетит очень высоко или в помещении. Квадрокоптер, который весит более 250 г, необходимо в обязательном порядке регистрировать.
Как искать дрон

Прежде всего, в ходе полета стоит следить за показаниями системы OSD (если таковая есть) на экране пульта или смартфона. Из них можно узнать последние координаты летательного аппарата, направление его перемещения, пройденное им расстояние и прочую актуальную информацию о полете. Эти данные очень важны и способны существенно помочь в проведении поисковой операции.
Ниже приводится список идей, которые помогут вам ответить на главный вопрос: «Как найти дрон?».
- Во-первых, для поиска можно использовать еще один БПЛА. Такой поисковик должен иметь на борту простейшую камеру и стоить дешевле временно утраченного беспилотника.
- Во-вторых, следует внимательно проверить кроны окружающих деревьев и кустов. Размах лопастей и яркая окраска корпуса дают хорошие шансы обнаружить потерявшуюся машину.
- Если аккумулятор упавшей машины не разрядился окончательно, пилот может заняться поиском огней, присутствующих в полетной зоне. Упавшая машина способна сообщить о себе сигналами бортового освещения.
- Еще одна идея заключается в использовании кнопки RTH на пульте управления. Пилот берет пульт и направляется в предполагаемую зону падения, периодически нажимая на эту кнопку. Если летательный аппарат просто утратил связь с оператором, то эти действия должны помочь.
- И последнее. Никогда не выключайте свой контроллер. Как только вы приблизитесь к БПЛА, ПДУ попробует самостоятельно восстановить соединение с ним. Этот способ является наиболее эффективным и многократно проверенным.
Проверяем цепь питания и выявляем проблему
Иногда проблема может лежать на поверхности и решение будет простым.
Проверьте питание ESC (регуляторов оборотов)
Идет ли питание на регуляторы оборотов? Это можно проверить с помощью мультиметра и подключенного аккумулятора к квадрокоптеру.
Послушайте какие звуки издает неработающий мотор
Когда вы включаете (подсоединяете аккумулятор) квадрокоптер, моторы проигрывают стартовые звуки, они настраиваются при прошивке в BL_Helli, подробнее ниже:
Как только вы подключите аккумулятор, проиграет мелодия, которую вы выбрали при прошивке, а после этого будет 3 коротких сигнала «пи-пи-пи». Это значит, что ESC (регуляторы оборотов) и моторы получают питание.
Пару секунд спустя, должны издаться еще 2 сигнала, но уже более длинных — «пииии-пииии», это значит, что ESC получают корректный сигнал газа от полетного контроллера.
Если вы слышите только первые 3 коротких сигнала, но не услышали вторые 2 сигнала, значит проблема с полетным контроллером, а это скорее всего уже проблема с выходами на портах.
Что нужно проверить:
- Цел ли сигнальный провод двигателя?
- Не замкнут ли контакт двигателя, который расположен на полетном двигателе, на землю? Для проверки возьмите мультиметр и в режиме прозвонки, проверьте контакт.
Что делать, если квадрокоптер не взлетает, но винты крутятся
Неисправность, с которой приходится столкнуться почти каждому новичку. Винты запущены на полную мощь, а дрон не поднимается в воздух, не реагируя на ПДУ. Такое случается, если неправильно установлены пропеллеры. Не спешите нести технику в ремонт: сначала сравните маркировку на пропеллерах с маркировкой на лучах – совпадение знаков обязательно.
Возможно, случилась путаница: пропеллер, предназначенный для вращения по часовой стрелке, установлен на мотор, работающий против часовой стрелки (и наоборот). При неверном направлении винтов аппарат не взлетит. Поставьте пропеллеры в соответствии с маркировкой, и попробуйте запустить технику повторно.
Квадрокоптер не реагирует на пульт
Если между машиной и ПДУ нет связи, в первую очередь проверяется пульт. Разряженный аккумулятор и севшие батарейки – распространенная причина отсутствия связи. Сигнализирует об отсутствии заряда в батарейках и загорающийся индикатор на коптере. В этом случае просто замените батарейку и оцените результат.
В некоторых случаях владелец аппарата неверно выполняет последовательность действий при запуске
Важно поэтапно и правильно соблюдать шаги, описанные в инструкции. К примеру: если на старте устройство лежит неправильно (на боку, перевернуто кверху вниз), оно не будет реагировать на пульт при команде подняться в воздух
Наличие ровной горизонтальной поверхности – обязательное условие работы инициализации некоторых моделей беспилотников с ПДУ.
Если рекомендованные меры приняты, а аппарат по прежнему не видит пульт, проблема кроется внутри ПДУ. Возможно, нарушены контакты, имеется обрыв проводков. Иногда проблема решается чисткой контактов (в случае окисления батареек).

Нюансы пилотирования и посадки дрона
После включения дайте DJI Mavic Pro пару минут, чтобы он обнаружил необходимое количество спутников, по которым будет ориентироваться.
Если число спутников оказалось меньше шести, в такой локации нужно летать очень осторожно или не летать вообще.
GPS работает не везде. На локации может быть недостаточно число спутников. Но случаются и искусственные ограничения. Возле Кремля, например, работа GPS ограничена из соображений безопасности.
Выберите режим полета
Предельная скорость полета дрона — 65 километров в час, а максимальное время в небе от одного заряда — 27 минут. Эти показатели были получены в безветренной среде, поэтому в реальном мире они ниже.
У DJI Mavic Pro два режима полета — P (позиционирование) и S (спортивный). В первом случае квадрокоптер использует сигнал спутников и систему переднего нижнего обзора для установки своего местоположения, автоматической стабилизации и навигации между препятствиями.
При достаточном освещении скорость дрона ограничена на отметке в 36 километров в час. А при выключении системы обнаружения сигнала дрон разгонится и до 58.
- Используйте спортивный режим пилотирования, только если уверены в своих навыках.
Во втором случае дрон переключается в режим предельной скорости, а пульт — максимальной чувствительности. При работе с этим режимом система автоматического распознавания препятствий отключается, а расстояние торможения увеличивается вплоть до 30 метров.
Ориентируйтесь на индикаторы полета
DJI Mavic Pro оборудован передними и задними индикаторами состояния.
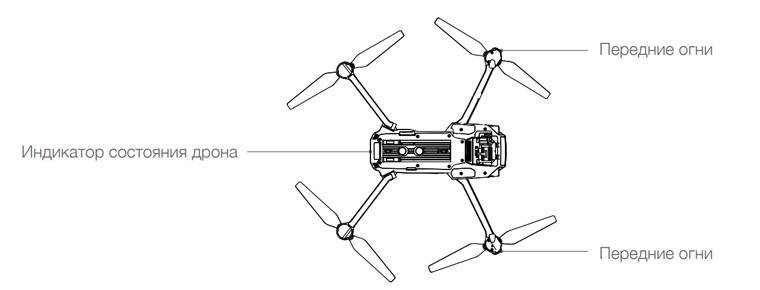
Передние огни показывают его ориентацию и постоянно горят красным, если он включен. А задний индикатор показывает состояние контроллера: диагностика, прогрев, режимы, торможение и так далее.










Обратите внимание, если быстро мигает желтый индикатор, квадрокоптер не может найти сигнал пульта. Если красный мигает медленно — низкий уровень заряда, быстро — плохой сигнал
Если поочередно мигают оба — нужна калибровка компаса.
Настройте возвращение дрона домой
С помощью функции автоматического возврата домой дрон летит в заданную точку согласно последней записи. В данном случае есть три режима: интеллектуальный, низкий заряд аккумулятора и аварийный.
В первом случае нужно нажать на кнопку RTH и следовать инструкциям на экране. Квадрокоптер будет избегать препятствия на своем пути и зависать, чтобы не допустить столкновений. При этом пилот сможет в любой момент переключиться в ручной режим.
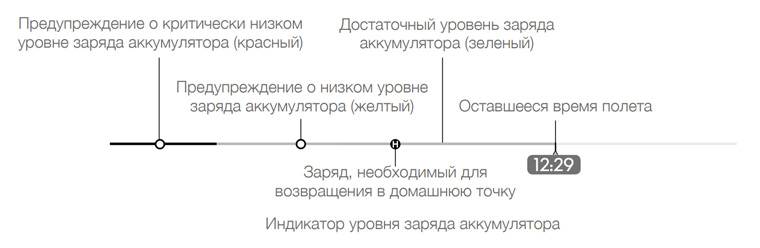
Во втором случае квадрокоптер сообщит пилоту, что заряда аккумулятора может не хватить на возврат домой. При этом рекомендуем согласится на автоматический возврат.
В третьем случае дрон автоматически возвращается на домашнюю точку, когда теряет сигнал с пультом. Но при его восстановлении полет можно будет без проблем продолжить переключением режима.
Посадка квадрокоптера
DJI Mavic Pro автоматически проводит сканирование поверхности для посадки и определяет подходящее по рельефу место. И точно сообщит, если что-то пошло не так, для получения дополнительных данных от пилота.
- Следите за техникой безопасности, не подходите и не берите дрон в руки, пока его двигатели не остановились.
Сразу после посадки выключите квадрокоптер и не пытайтесь совершить повторный полет. Автопилот устройства может сработать неверно, что окажется чревато последствиями.
Повышенный шум работы и нестабильный полет
Если коптер издает повышенный шум и неожиданно заваливается набок при полете, следует проверить состояние лопастей. Они деформируются и повреждаются при столкновении с преградами или грубой посадке. Коптер нужно выключить и внимательно осмотреть пропеллерные блоки.

Совет! Повреждение лопасти удобно определить, если расположить общую поверхность пропеллеров на уровне глаз.
Выпуклая форма лопасти означает, что она перестает создавать надлежащую подъемную силу. Это особенно заметно в полете, при повышенных оборотах двигателя. Пропеллер можно аккуратно выровнять или установить вместо него запасной.
В моделях коптеров, оснащенных редуктором, проблема повышенного шума может быть связана как с загрязнениями, так и физическими повреждениями. Внутри коробки преобразования оборотов расположена система шестерней. При недостатке смазки, попадании внутрь возникает повышенный шум. Это может привести к физическому повреждению ведущей шестерни. Такой ремонт производится только путем проверки состояния редуктора и замены изношенных или сломанных частей.

Интеллектуальные режимы неправильно срабатывают в полете
Неэффективная работа интеллектуальных режимом напрямую связана с количеством спутников, с которыми установил связь дрон. Если спутников недостаточно, система GPS работает неправильно. В помещениях ситуация еще хуже, т. к. под крышей коптер может вообще не подключиться. Облачность и плохая погода мешают беспилотнику установить связь со спутниками на открытом пространстве.
В таких случаях рекомендуется подождать хорошей погоды, т. к. подобные полеты могут обернуться поломкой техники. Нередко летающие аппараты теряют управление прямо в воздухе, и все это сопровождается падением оборотов пропеллеров. Еще одна причина плохой связи со спутниками — неисправность модуля GPS. Проблема встречается очень редко.

Назначение настройки при полете
Для чего нужна настройка квадрокоптера? Без нее дрон будет кренить на один борт и не сможет лететь в пункт назначения, определенный владельцем. Управлять полетом в таких условиях невозможно и есть риск привести беспилотник в негодность раньше времени. Те, кто не умеют обращаться с устройствами, списывают проблемы с полетом на заводской брак, низкое качество товара и на другие причины. На самом деле требуется установка настроек.
Как определить, нужно ли откалибровать квадрокоптер? Достаточно провести короткий полет, и просмотреть, как беспилотник ведет себя в пространстве. Для этого устройство поднимается в воздух хотя бы на полметра. Если траектория полета хаотичная – ему требуется калибровка. Слишком низкая высота мешает настраивать машину. Квадрокоптер держится в воздухе благодаря воздушной подушке, которую создают винты.
Типы калибровки
Есть несколько видов триммирования:
- Механическое — при незначительном отклонении необходимо подкрутить регулятор тяги;
- Автоматическое –если нужно сместить триммер на 5 позиций и больше. Устройство настраивается с пульта дистанционного управления.
Механическая калибровка квадрокоптера требует всего нескольких минут, а вот автоматическую выполнять сложнее и дольше. Выполняется работа с переключателями. Один раз откалибровать устройство иногда мало и требуется калибровка до тех пор, пока беспилотник не встанет в нужное положение. При наклоне влево треммирование выполняется в правую сторону для равновесия.
Подготовка устройства к полету
Перед тем, как запустить дрон, нужно выполнить несколько простых шагов:
- Вставить аккумулятор внутрь устройства без включения. (не относится к моделям, со встроенной батареей);
- Чтобы настройка прошла быстрее, требуется поставить дрон на ровное место (к примеру на стол);
- Далее нужно взять квадрокоптер в руки и включить его, а затем поставить на поверхность;
- В новых моделях синхронизация гироскопов занимает примерно 10-20 секунд.
Триммер
Джостики для квадрокоптера обычно имеют стандартные кнопки и функции:
- На джостике есть правый и левый стики. В правом – вертикальное перемещение дрона и наклон вперед, а в левом – горизонтальное передвижение;
- Верхняя левая кнопка отвечает за переключение скорости;
- Верхняя правая кнопка – поворот устройства на 360 градусов;
- Слева по направлению от правого стика – переключатель движения «вперед-назад»;
- Переключатель режимов находится под правым стиком.
- Кнопка включения и выключения квадрокоптера располагается в центре джостика.
- Под кнопкой включения – дислпей, отвечающий за расходы. Высокие расходы для быстрых полетов, низкие- для малой высоты.
Определение проблем
Как выполнять триммирование исходя из положения дрона в пространстве? Есть несколько основных проблем во время полетов:
- Если наблюдается крен в правую или левую сторону, то проблема в правом рычаге и требуется регулировка по крену.
- Если устройство без команды пользователя наклонилось вперед, а потом назад и в обратном порядке, выполняется регулировка по тангажу левым стиком.
- Если в движении есть и крен и наклон, настраивать нужно оба стика.
Триммирование позволяет настроить полет, чтобы избежать столкновений с домами и деревьями. Это не только продлит срок службы квадрокоптера, но и обезопасит окружающих людей. Вся информация о том, как откалибровать конкретный беспилотник указана в инструкции по эксплуатации. Также в ней есть сведения о том, требуется ли калибровка для дрона. Но, в некоторых моделях, особенно тех, что относятся к категории бюджетных, инструкция отсутствует.
Рекомендуем проводить калибровку, так как она поможет по крайней мере, познакомиться с джостиком и привыкнуть к стикам. Лайфхак от любителей квадрокоптеров: рекомендуется сразу переходить на высокие расходы, не засиживаясь на низких, чтобы привыкнуть к чувствительности стика.
Основные виды поломок и их устранение
Прежде чем рассмотреть основные виды неисправностей инверторных устройств следует ознакомиться с устройством инвертора.
Электрическая схема сварочного инвертора.
Большинство популярных моделей состоит из:
- блока питания;
- блока управления;
- силового блока.
Неисправности и ремонт сварочных аппаратов в большинстве случаев связаны с поломкой силового блока, состоящего из:
- Первичного и вторичного выпрямителей.
В состав блока входят два диодных моста различной мощности. Первый мост способен выдерживать до 40 ампер ток и до 250 вольт напряжение. Второй диодный мост собран из более мощных элементов и способен поддерживать силу тока 250 ампер при напряжении порядка 100 вольт. Возможные ошибки данного модуля связаны с аварией диодов первичного или вторичного моста. - Инверторного преобразователя.
Поломка силового транзистора инверторного преобразователя часто является ответом на вопрос почему сварочный аппарат не варит. Ремонт инвертора можно произвести путем замены транзистора на аналог с параметрами силы тока 32 ампера и напряжением 400 вольт. - Высокочастотного трансформатора.
Как правило, трансформатор состоит из нескольких обмоток, повышающих силу тока до 250 ампер при напряжении до 40 вольт. Большинство инверторного оборудования имеет две обмотки, выполненные при помощи медной проволоки или ленты.
Перед тем, как отремонтировать сварочные аппараты своими руками следует внимательно продиагностировать прибор и четко определить, какой из элементов неисправен.
Не стоит даже пытаться самостоятельно отремонтировать инвертор из корпуса которого повалил плотный белый дым. В таких случаях самым правильным решением будет обращение в квалифицированный ремонтный центр.









Компоновка деталей сварочного инвертора.
Ремонт сварочного полуавтомата с инверторным источником может понадобиться при возникновении следующих неисправностей:
- Нестабильное горение раскаленной дуги или сильное разбрызгивание материала электрода.
Неисправность в большинстве случаев связана с неправильным выбором рабочего тока. В инструкции по эксплуатации сказано, что на 1 миллиметр диаметра электрода должна приходится сила тока от 20 до 40 ампер. - Прилипания сварки к металлу.
Такое поведение характерно для устройств, работающих при недостаточном напряжении. Подобные неисправности и способы их устранения четко описаны в сопроводительной документации. При прилипании электрода к свариваемому материалу следует очистить контакты клемм, к которым подключаются модули инверторного устройства. Кроме этого, не лишним будет замерить напряжение в электрической сети. - Отсутствие дуги при включении аппаратуры.
Дефект зачастую связан с банальным перегревом устройства или повреждением силовых кабелей кабелей в процессе длительной эксплуатации при повышенных температурах. - Аварийное отключение инвертора.
Если в процессе проведения работ аппарат внезапно отключился, то наверняка сработала защита от короткого замыкания между проводами и корпусом. Ремонт устройства в случае возникновения подобного дефекта состоит в нахождении и замене поврежденных элементов силовой цепи инвертора. - Огромное потребление электрического тока при холостой работе.
Типичная неисправность, возникающая вследствие замыкания витков на токопроводящих катушках. Восстановление работоспособности устройства после такой неисправности состоит в полной перемотке катушек и наложении слоя дополнительной изоляции. - Отключение сварочного оборудования через определенный промежуток времени.
Подобное поведение характерно для перегревающихся инверторных электроприборов. Если сварка внезапно выключилась, то нужно дать ей остыть и через 30-40 минут можно продолжить работу. - Посторонние звуки при работе блока питания.
Устранение дефекта заключается в затягивании болтов, стягивающих элементы магниторовода. Помимо этого, неисправность может быть связана с дефектом в крепеже сердечника или замыканием между кабелями.
Важно отметить, что большинство видов работ следует выполнять с использованием паяльника, укомплектованного специальным отсосом. Такой инструмент существенно облегчает работу по нанесению и удалению припоя на посадочные места радиотехнических элементов
Профессиональная калибровка квадрокоптера
Наша компания предлагает услугу по настройке многовинтовых летательных аппаратов любого назначения. В зависимости от сферы использования, наши специалисты выполнят настройку
квадрокоптера таким образом, чтобы он был максимально отзывчивым и удобным для решения поставленных задач. Обычно услуга включает:
- Настройку электроники и аппаратуры управления;
- Настройку компаса, акселерометра и других датчиков;
Настройку
регуляторов скорости двигателей;- Регулировку отзывчивости джойстиков (пульта управления);
- Прошивку или перепрошивку аппарата (в случае необходимости).
Правильно выполненная настройка
квадрокоптера делает его максимально управляемым в любом режиме полета.
Как найти улетевший дрон по координатам GPS

Поиск дрона значительно облегчает установка на нем специального отслеживающего устройства – трекера.
Эти приборы имеют несколько разновидностей:
- GPS трекеры;
- RF трекеры;
- Bluetooth метки.
Главным преимуществом GPS трекеров является их универсальность. Прибор поддерживает связь с космической спутниковой группировкой, принимает данные о координатах своего положения и через каналы мобильной связи передает их на сотовый телефон пилота.
Эти устройства имеют значительный ценовой разброс: от 30-40 до нескольких сотен долларов. Если вы приобретаете модель низшей ценовой категории, произведенную в Китае, стоит внимательно прочитать описание: вы можете приобрести трекер, способный определить только координаты ближайшей вышки мобильной связи.
RF трекеры транслируют радиоволны, которые принимаются устройствами обнаружения. По этой причине они работают даже в отдаленных районах с не очень развитой инфраструктурой. Единственным недостатком такой системы является ее малая дальность – порядка 2-3 км.
В последние годы появилась серия отслеживающих устройств, поддерживающих технологию Bluetooth. Использование этих устройств является наименее дорогим вариантом, но их предельная дальность оставляет желать лучшего.
Когда необходима регулировка коптера
Существует ошибочное мнение, что правильно настроенный аппарат не нуждается больше в регулировке. А также, что каждый новый квадрокоптер – настроен правильно. Оба этих утверждения в корне не верны. Конечно, проводить настройку
регуляторов летательного аппарата перед каждым полетом вовсе не обязательно. Но сделать ее необходимо в следующих случаях:
- При покупке нового квадрокоптера – перед его использованием;
- При изменении конфигурации аппарата, замене или установке новых элементов;
- При перемещении GPS-модуля;
- Если у
квадрокоптера нарушена
стабилизация; - После падения или ремонта.
Возможные неисправности
Кто-то может думать, что существует 159 причин, и сделать все самому нереально. Однако, ремонт и диагностику вполне можно сделать самостоятельно. Причины того, что плохо заводится скутер, можно разделить на несколько категорий:
- Проблемы с зажиганием
- Проблемы с топливом
- Проблемы со стартером
- Проблемы с электрической цепью.
Для полной проверки мопеда следует провести комплексную диагностику, поочередно выполняя проверку каждой из этих категорий.
Проблемы с топливом
В этой категории неисправными могут быть несколько деталей. Самые распространенные поломки – это выход из строя топливного крана, забитый воздушный фильтр или карбюратор.
Топливный кран
У этого элемента системы питания может быть две неисправности: не льется топливо, либо бензин льется не переставая. Диагностируется топливный кран очень просто:
- Снимите шланг подачи топлива с карбюратора и шланг вакуума с крышки головки цилиндра. Потяните ртом воздух в себя через вакуумный шланг, тем самым принудительно создав вакуум. Из шланга подачи должен потечь бензин. Если этого не происходит, следует заменить топливный кран.
- В случае, когда из шланга подачи беспрерывно потечет топливо, следует сразу менять кран.
- Если топливо течет с трудом, тогда замените топливный фильтр или прочистите вакуумный кран.

В первую очередь следует проверить работоспособность топливного крана
Карбюратор и воздушный фильтр
Эти два элемента связаны между собой. Попробуйте завести скутер без воздушного фильтра. Если удалось, то меняйте фильтр. Что касается карбюратора, то его необходимо периодически чистить. Особенно учитывая качество бензина на заправках.

Если воздушный фильтр забился мусором, завести скутер будет невозможно
Проверить, подается ли топливо в цилиндр, можно, выкрутив свечу и оценив ее состояние. Мокрая свеча свидетельствует о проблемах с переливом или неисправности системы зажигания. Закройте пальцем свечное отверстие и прокрутите вал двигателя кик-стартером. При исправной подаче топлива, на пальце останутся следы бензина.
Почему ваш беспилотник может улететь
Дрон может улетать и пропасть с поля зрения по разным причинам, одна из основных – невнимательно прочитанная инструкция. Остаться без него можно, если он сам потеряет сигнал со спутниками GPS. Это может случиться, в том случае, когда беспилотник будет лететь близко с местом с сильным электромагнитным излучением, а также если при передаче сигнала из-за помех случится сбой.
К проблеме приведет и неисправная батарея пульта управления. При низком заряде бортового аккумулятора начнут мерцать маршрутные огни, а динамик пульта дистанционного управления будет издавать сигнал тревоги. Оператор в течение нескольких минут может вернуть и приземлить аппарат. Если человек не среагирует, коптер постарается сам долететь до места взлета. Но может так случиться, что он упадёт там, где у него появились проблемы.
Другие причины не прилета аппарата:
- ошибки при пилотировании;
- не срабатывание кнопки RTH;
- потеря связи в результате значительного расстояния между передатчиком и приемником;
- факторы окружающей среды (ветер, осадки, температура минус 20-30 градусов).
Некоторые операторы считают, что успеют увернуть беспилотный летательный аппарат от препятствий, которые могут неожиданно появиться на пути. Но если этого сделать не получится, коптер окажется на земле. Опасность заключается в том, что такое может случиться в тот момент, когда техника находится на далеком расстоянии и разыскать ее будет сложно.
 Найти потерявшийся дрон можно несколькими способами
Найти потерявшийся дрон можно несколькими способами
Если вы потеряли квадрокоптер
При полетах в городской черте могут произойти сбои в работе GPS. Если наблюдаются проблемы с управлением, квадрокоптер переводят в ручной режим управления и немедленно идут в то место, откуда он взлетел. Отправляя беспилотник полетать в городе, нужно соблюдать правила безопасности. Он должен быть виден. Взлетать можно на несколько метров выше самого высокого видимого здания и постоянно придерживаться этого уровня. В городе нельзя использовать режим Sport.
Очень часто беспилотный летательный аппарат, в том числе модели DJI Фантом, Skylight Mobicaro, Syma X23W, Syma X25PRO, WLtoys V666, садится, если у него разряжен аккумулятор. В ветреную погоду при автоматической посадке его может унести в сторону леса. Сopter может упасть в траву, зацепиться за дерево. Плохо, если упадет в воду. Как найти квадрокоптер, который улетел? Хорошо, если есть запись полета с курсовой камеры с данными GPS, выводимыми на экран. Заранее нужно установить точку возврата, если сигнал пропадет, управление перевести в ручной режим.
Самые распространенные поломки
Очень много зависит от пилота, он должен понимать возможные ситуации способные вывести дрон из рабочего состояния и знать ряд правил, чтобы предотвратить их. Мы рассмотрим только ситуации, которые подконтрольны пилоты, не будем учитывать физический отказ дрона (по ряду причин)
Пилотирование в помещении
Есть некоторые модели дронов, которыми можно управлять в закрытом помещении, но большинство не допускают такого пилотирования. Именно по причине нарушений рекомендаций пилотирования, случаются аварии так, как дрону недостаточно пространства. Помните это опасно не только для вашего квадра, но и для людей и имущества, поэтому соблюдайте правила и рекомендации.






Полет в режиме FPV
Используя режим – Полет от первого лица, будьте внимательны очень легко потеряться в пространстве ведь вы акцентируете внимание на экран и теряете представление о месте расположения вашего дрона. А если вы используете очки, опасность столкновения значительно увеличивается
Используя очки, режим Полета от первого лица лучше выбирать, открытые пространства, так вы сможете визуально сориентироваться где находится ваш дрон.
Дальние расстояния и потеря ориентации
Приключения манят, хочется летать далеко и высоко. Идея заманчивая, но очень небезопасная. Вы можете случайно нарушить закон или потерять свой дрон. Есть простые правила, пилотировать дрон в пределах видимости и не подниматься слишком высоко.
Реанимация дрона
Если вы соблюдаете все правила протокола полета, то вас не затруднит определить место падения. Если у вас более дорогая версия с GPS, вы можете воспользоваться приложением, чтобы узнать место крушения.
После того, как дрон найден, проведите первичный осмотр. Зафиксируйте все повреждения (сфотографируйте и запишите). Такие действия будут актуальны при действующей гарантии.
Перед тем, как поднять дрон, нужно убедиться, что он не включен
Почему это так важно? Если дрон не будет выключен, есть шанс того, что пропеллеры могут заработать (для стабилизации дрона) когда вы начнете перемещать дрон. Так же поступите и спультом управления, отключите его, если он работает
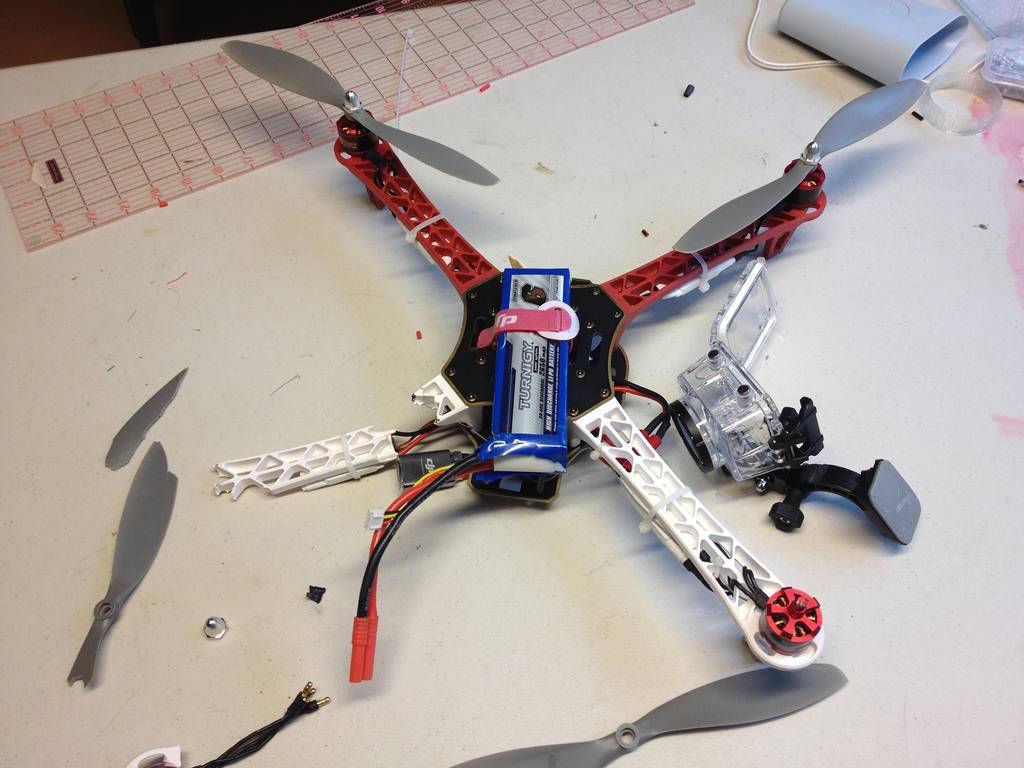
Проверка винтов
Задача номер один, грамотно сбалансировать пропеллеры, это делается для того, чтобы во время полета не было лишних вибраций, способных затруднить полет дрона или вывести его из строя.
Наличие повреждений будь то, скол или трещина (независимо от размеров) повлекут за собой в дальнейшем необходимость замены таких винтов. Вероятней всего, после падения, столкновения с объектами, винты будут повреждены
Всегда тщательно осматривайте винты, любые повреждения могут обернуться катастрофой для дрона.
Проводка
Как и любое устройство, у квадрокоптера множества проводов, обеспечивающие питание всего устройства. При проверке дрона после полета, обязательно осмотрите жгут проводов, для предотвращения ослабленных соединений. Так же проверьте нет ли разрывов, ожогов или других повреждений. Любая проблема с проводкой, может привести к крашу квадрика.